 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Timescale Model Predictive Control for Slow-Fast Systems
Nov 18, 2025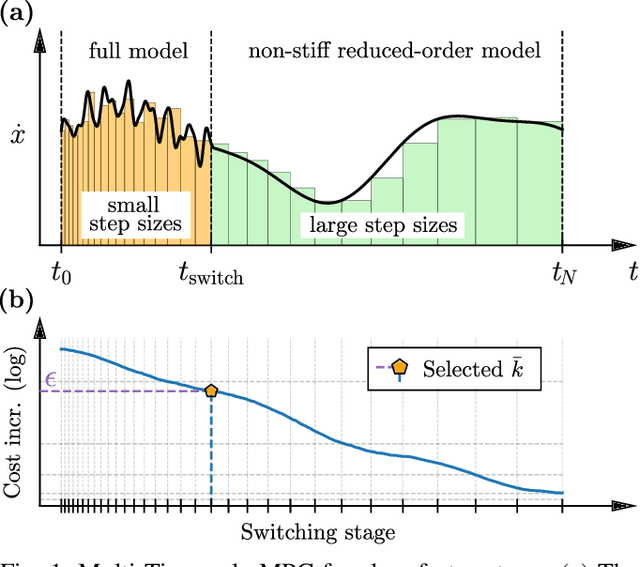
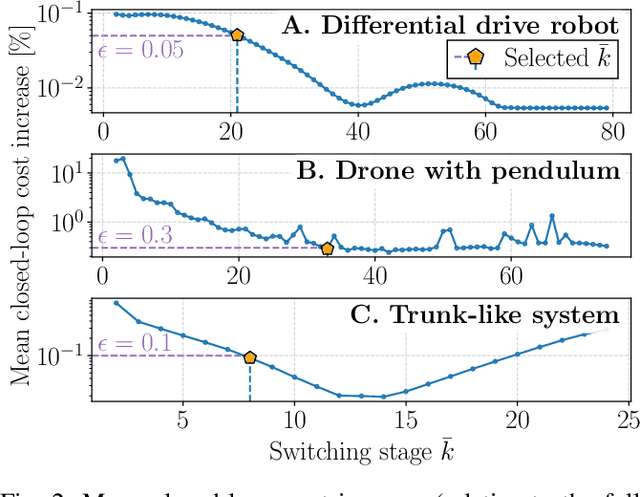
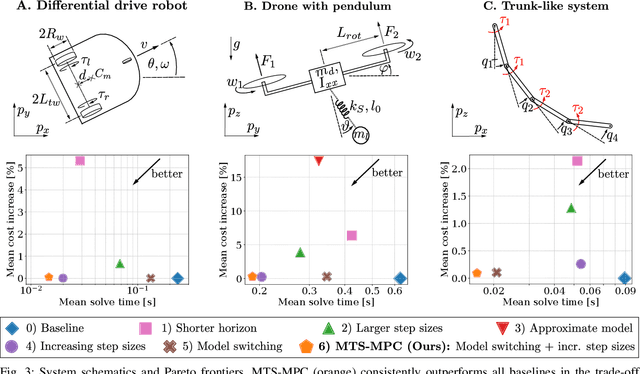
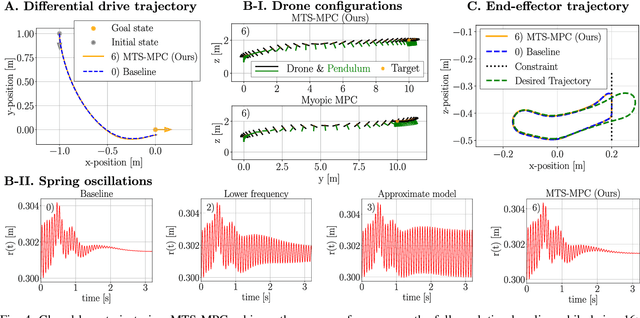
Model Predictive Control (MPC) has established itself as the primary methodology for constrained control, enabling autonomy across diverse applications. While model fidelity is crucial in MPC, solving the corresponding optimization problem in real time remains challenging when combining long horizons with high-fidelity models that capture both short-term dynamics and long-term behavior. Motivated by results on the Exponential Decay of Sensitivities (EDS), which imply that, under certain conditions, the influence of modeling inaccuracies decreases exponentially along the prediction horizon, this paper proposes a multi-timescale MPC scheme for fast-sampled control. Tailored to systems with both fast and slow dynamics, the proposed approach improves computational efficiency by i) switching to a reduced model that captures only the slow, dominant dynamics and ii) exponentially increasing integration step sizes to progressively reduce model detail along the horizon. We evaluate the method on three practically motivated robotic control problems in simulation and observe speed-ups of up to an order of magnitude.
A robust and adaptive MPC formulation for Gaussian process models
Jul 02, 2025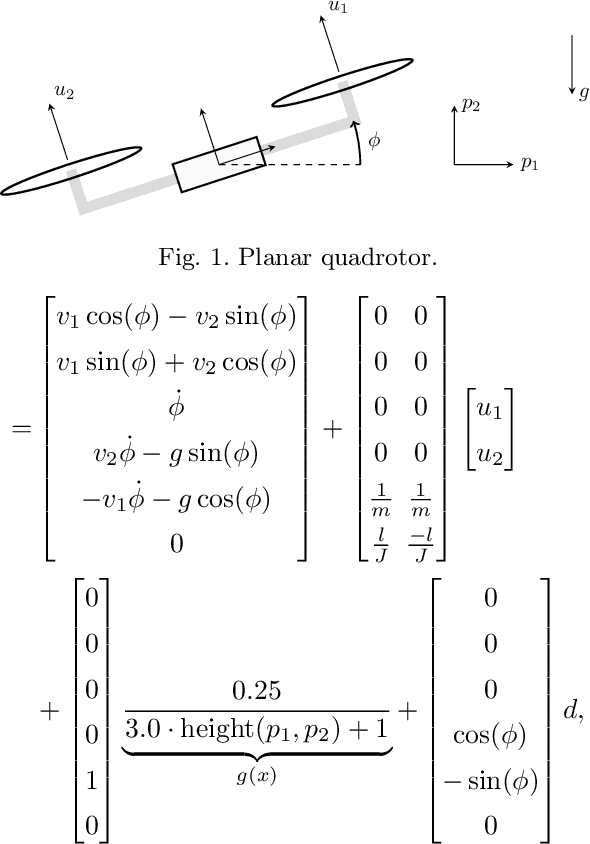

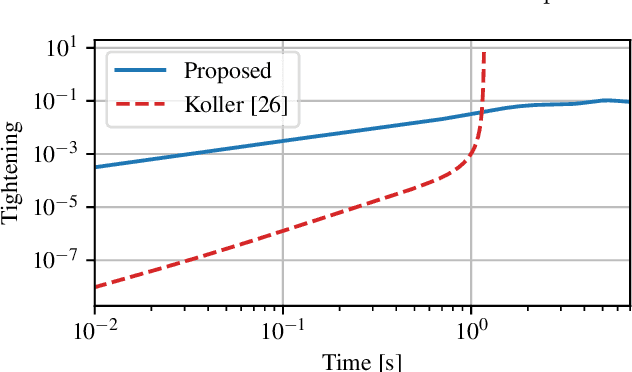
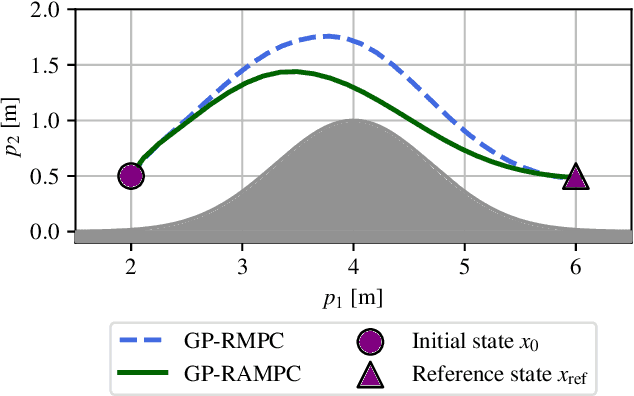
In this paper, we present a robust and adaptive model predictive control (MPC) framework for uncertain nonlinear systems affected by bounded disturbances and unmodeled nonlinearities. We use Gaussian Processes (GPs) to learn the uncertain dynamics based on noisy measurements, including those collected during system operation. As a key contribution, we derive robust predictions for GP models using contraction metrics, which are incorporated in the MPC formulation. The proposed design guarantees recursive feasibility, robust constraint satisfaction and convergence to a reference state, with high probability. We provide a numerical example of a planar quadrotor subject to difficult-to-model ground effects, which highlights significant improvements achieved through the proposed robust prediction method and through online learning.
Optimal kernel regression bounds under energy-bounded noise
May 28, 2025Non-conservative uncertainty bounds are key for both assessing an estimation algorithm's accuracy and in view of downstream tasks, such as its deployment in safety-critical contexts. In this paper, we derive a tight, non-asymptotic uncertainty bound for kernel-based estimation, which can also handle correlated noise sequences. Its computation relies on a mild norm-boundedness assumption on the unknown function and the noise, returning the worst-case function realization within the hypothesis class at an arbitrary query input location. The value of this function is shown to be given in terms of the posterior mean and covariance of a Gaussian process for an optimal choice of the measurement noise covariance. By rigorously analyzing the proposed approach and comparing it with other results in the literature, we show its effectiveness in returning tight and easy-to-compute bounds for kernel-based estimates.
Finite-Sample-Based Reachability for Safe Control with Gaussian Process Dynamics
May 12, 2025Gaussian Process (GP) regression is shown to be effective for learning unknown dynamics, enabling efficient and safety-aware control strategies across diverse applications. However, existing GP-based model predictive control (GP-MPC) methods either rely on approximations, thus lacking guarantees, or are overly conservative, which limits their practical utility. To close this gap, we present a sampling-based framework that efficiently propagates the model's epistemic uncertainty while avoiding conservatism. We establish a novel sample complexity result that enables the construction of a reachable set using a finite number of dynamics functions sampled from the GP posterior. Building on this, we design a sampling-based GP-MPC scheme that is recursively feasible and guarantees closed-loop safety and stability with high probability. Finally, we showcase the effectiveness of our method on two numerical examples, highlighting accurate reachable set over-approximation and safe closed-loop performance.
Towards safe and tractable Gaussian process-based MPC: Efficient sampling within a sequential quadratic programming framework
Sep 13, 2024Learning uncertain dynamics models using Gaussian process~(GP) regression has been demonstrated to enable high-performance and safety-aware control strategies for challenging real-world applications. Yet, for computational tractability, most approaches for Gaussian process-based model predictive control (GP-MPC) are based on approximations of the reachable set that are either overly conservative or impede the controller's safety guarantees. To address these challenges, we propose a robust GP-MPC formulation that guarantees constraint satisfaction with high probability. For its tractable implementation, we propose a sampling-based GP-MPC approach that iteratively generates consistent dynamics samples from the GP within a sequential quadratic programming framework. We highlight the improved reachable set approximation compared to existing methods, as well as real-time feasible computation times, using two numerical examples.