 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Optimal Guidance and Control of a Low-cost Re-usable Electric Model Rocket
Mar 08, 2021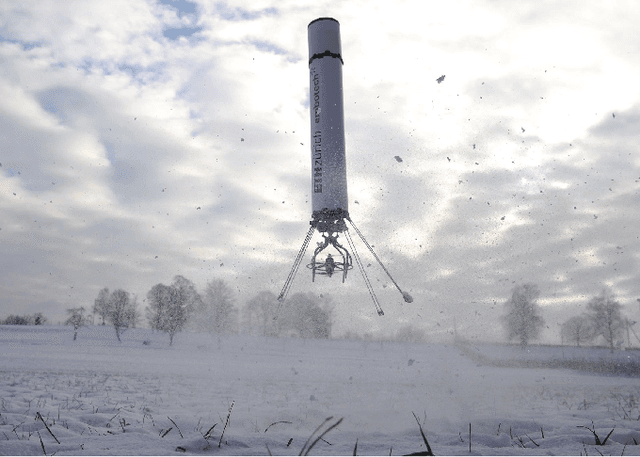
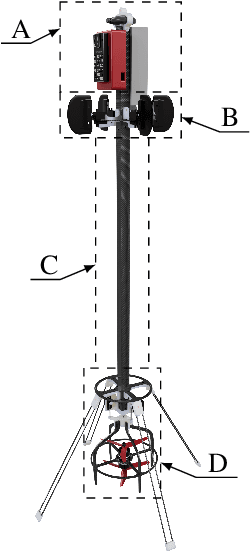
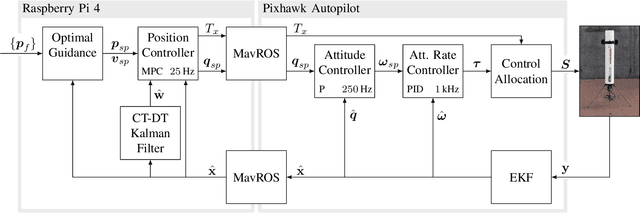
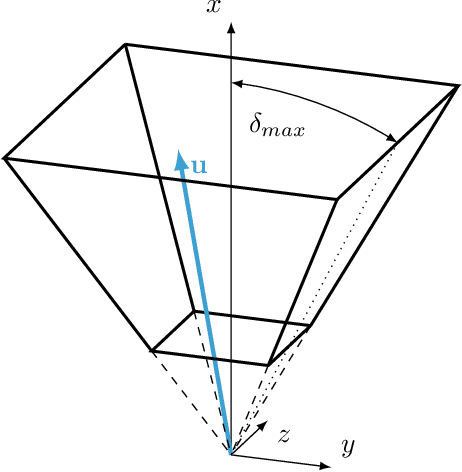
In the last decade, autonomous vertical take-off and landing (VTOL) vehicles have become increasingly important as they lower mission costs thanks to their re-usability. However, their development is complex, rendering even the basic experimental validation of the required advanced guidance and control (G & C) algorithms prohibitively time-consuming and costly. In this paper, we present the design of an inexpensive small-scale VTOL platform that can be built from off-the-shelf components for less than 1000 USD. The vehicle design mimics the first stage of a reusable launcher, making it a perfect test-bed for G & C algorithms. To control the vehicle during ascent and descent, we propose a real-time optimization-based G & C algorithm. The key features are a real-time minimum fuel and free-final-time optimal guidance combined with an offset-free tracking model predictive position controller. The vehicle hardware design and the G & C algorithm are experimentally validated both indoors and outdoor, showing reliable operation in a fully autonomous fashion with all computations done on-board and in real-time.
Optimization-Based Autonomous Racing of 1:43 Scale RC Cars
Nov 20, 2017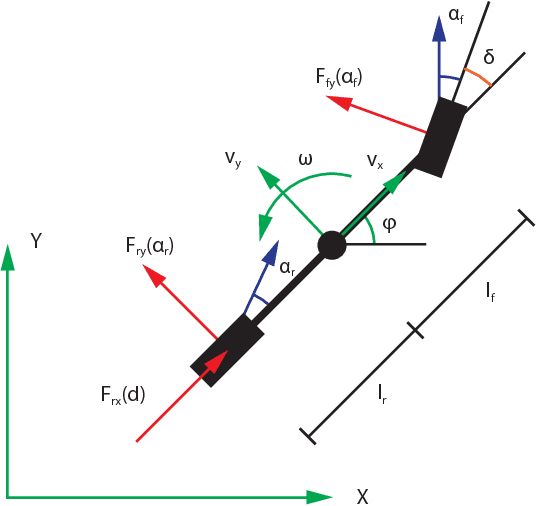
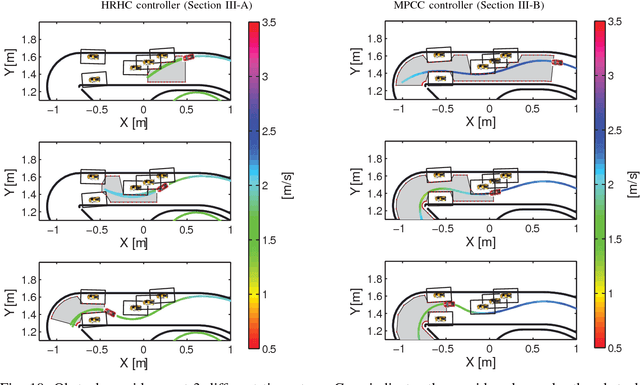
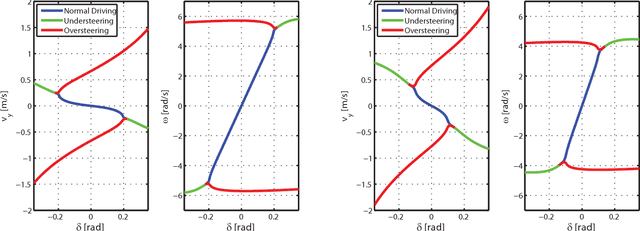

This paper describes autonomous racing of RC race cars based on mathematical optimization. Using a dynamical model of the vehicle, control inputs are computed by receding horizon based controllers, where the objective is to maximize progress on the track subject to the requirement of staying on the track and avoiding opponents. Two different control formulations are presented. The first controller employs a two-level structure, consisting of a path planner and a nonlinear model predictive controller (NMPC) for tracking. The second controller combines both tasks in one nonlinear optimization problem (NLP) following the ideas of contouring control. Linear time varying models obtained by linearization are used to build local approximations of the control NLPs in the form of convex quadratic programs (QPs) at each sampling time. The resulting QPs have a typical MPC structure and can be solved in the range of milliseconds by recent structure exploiting solvers, which is key to the real-time feasibility of the overall control scheme. Obstacle avoidance is incorporated by means of a high-level corridor planner based on dynamic programming, which generates convex constraints for the controllers according to the current position of opponents and the track layout. The control performance is investigated experimentally using 1:43 scale RC race cars, driven at speeds of more than 3 m/s and in operating regions with saturated rear tire forces (drifting). The algorithms run at 50 Hz sampling rate on embedded computing platforms, demonstrating the real-time feasibility and high performance of optimization-based approaches for autonomous racing.