 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Optimal Guidance and Control of a Low-cost Re-usable Electric Model Rocket
Mar 08, 2021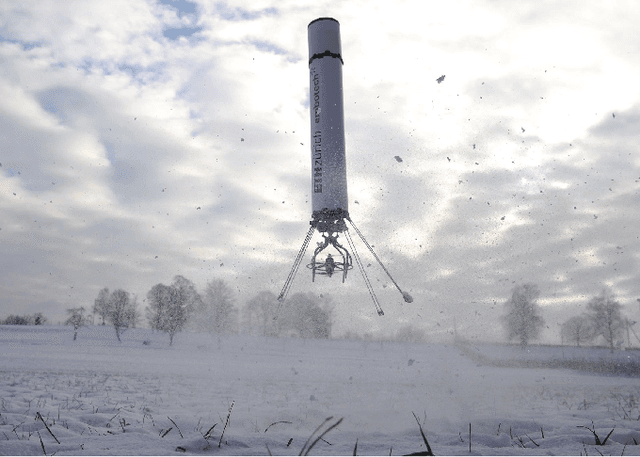
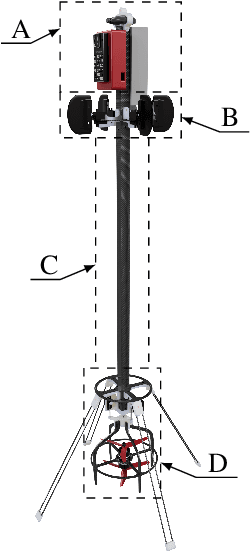
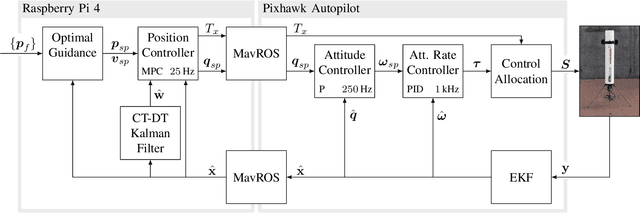
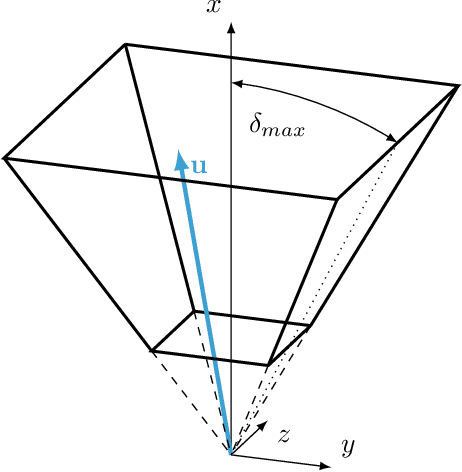
In the last decade, autonomous vertical take-off and landing (VTOL) vehicles have become increasingly important as they lower mission costs thanks to their re-usability. However, their development is complex, rendering even the basic experimental validation of the required advanced guidance and control (G & C) algorithms prohibitively time-consuming and costly. In this paper, we present the design of an inexpensive small-scale VTOL platform that can be built from off-the-shelf components for less than 1000 USD. The vehicle design mimics the first stage of a reusable launcher, making it a perfect test-bed for G & C algorithms. To control the vehicle during ascent and descent, we propose a real-time optimization-based G & C algorithm. The key features are a real-time minimum fuel and free-final-time optimal guidance combined with an offset-free tracking model predictive position controller. The vehicle hardware design and the G & C algorithm are experimentally validated both indoors and outdoor, showing reliable operation in a fully autonomous fashion with all computations done on-board and in real-time.
Iterative Learning Control for Fast and Accurate Position Tracking with a Soft Robotic Arm
Mar 04, 2019



This paper presents the application of an iterative learning control scheme to improve the position tracking performance for a soft robotic arm during aggressive maneuvers. Two antagonistically arranged, inflatable bellows actuate the robotic arm and provide high compliance while enabling fast actuation. Low-cost switching valves are used for pressure control of the soft actuators. A norm-optimal iterative learning control scheme based on a linear model of the system is presented and applied in parallel with a feedback controller. The learning scheme is experimentally evaluated on an aggressive trajectory involving set point shifts of 60 degrees within 0.2 seconds. The effectiveness of the learning approach is demonstrated by a reduction of the root-mean-square tracking error from 13 degrees to less than 2 degrees after applying the learning scheme for less than 30 iterations.