 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinding the Politeness Gap in Cross-cultural Communication
Jun 18, 2025Misunderstandings in cross-cultural communication often arise from subtle differences in interpretation, but it is unclear whether these differences arise from the literal meanings assigned to words or from more general pragmatic factors such as norms around politeness and brevity. In this paper, we report three experiments examining how speakers of British and American English interpret intensifiers like "quite" and "very." To better understand these cross-cultural differences, we developed a computational cognitive model where listeners recursively reason about speakers who balance informativity, politeness, and utterance cost. Our model comparisons suggested that cross-cultural differences in intensifier interpretation stem from a combination of (1) different literal meanings, (2) different weights on utterance cost. These findings challenge accounts based purely on semantic variation or politeness norms, demonstrating that cross-cultural differences in interpretation emerge from an intricate interplay between the two.
Finding structure in logographic writing with library learning
May 11, 2024One hallmark of human language is its combinatoriality -- reusing a relatively small inventory of building blocks to create a far larger inventory of increasingly complex structures. In this paper, we explore the idea that combinatoriality in language reflects a human inductive bias toward representational efficiency in symbol systems. We develop a computational framework for discovering structure in a writing system. Built on top of state-of-the-art library learning and program synthesis techniques, our computational framework discovers known linguistic structures in the Chinese writing system and reveals how the system evolves towards simplification under pressures for representational efficiency. We demonstrate how a library learning approach, utilizing learned abstractions and compression, may help reveal the fundamental computational principles that underlie the creation of combinatorial structures in human cognition, and offer broader insights into the evolution of efficient communication systems.
Interferometric single-pixel imaging with a multicore fiber
Jul 17, 2023Lensless illumination single-pixel imaging with a multicore fiber (MCF) is a computational imaging technique that enables potential endoscopic observations of biological samples at cellular scale. In this work, we show that this technique is tantamount to collecting multiple symmetric rank-one projections (SROP) of a Hermitian \emph{interferometric} matrix -- a matrix encoding the spectral content of the sample image. In this model, each SROP is induced by the complex \emph{sketching} vector shaping the incident light wavefront with a spatial light modulator (SLM), while the projected interferometric matrix collects up to $O(Q^2)$ image frequencies for a $Q$-core MCF. While this scheme subsumes previous sensing modalities, such as raster scanning (RS) imaging with beamformed illumination, we demonstrate that collecting the measurements of $M$ random SLM configurations -- and thus acquiring $M$ SROPs -- allows us to estimate an image of interest if $M$ and $Q$ scale linearly (up to log factors) with the image sparsity level, hence requiring much fewer observations than RS imaging or a complete Nyquist sampling of the $Q \times Q$ interferometric matrix. This demonstration is achieved both theoretically, with a specific restricted isometry analysis of the sensing scheme, and with extensive Monte Carlo experiments. Experimental results made on an actual MCF system finally demonstrate the effectiveness of this imaging procedure on a benchmark image.
Learning Evolved Combinatorial Symbols with a Neuro-symbolic Generative Model
Apr 16, 2021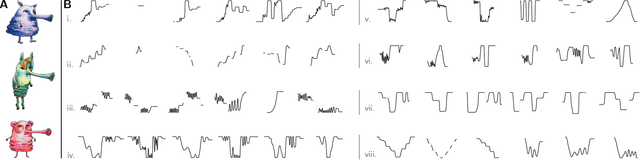
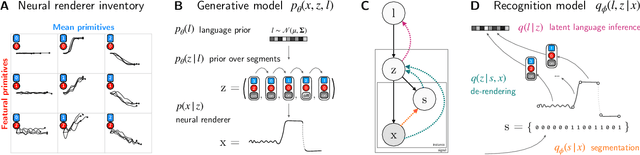
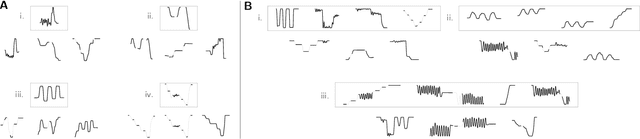
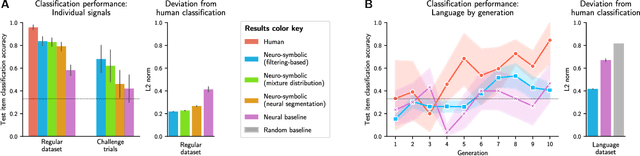
Humans have the ability to rapidly understand rich combinatorial concepts from limited data. Here we investigate this ability in the context of auditory signals, which have been evolved in a cultural transmission experiment to study the emergence of combinatorial structure in language. We propose a neuro-symbolic generative model which combines the strengths of previous approaches to concept learning. Our model performs fast inference drawing on neural network methods, while still retaining the interpretability and generalization from limited data seen in structured generative approaches. This model outperforms a purely neural network-based approach on classification as evaluated against both ground truth and human experimental classification preferences, and produces superior reproductions of observed signals as well. Our results demonstrate the power of flexible combined neural-symbolic architectures for human-like generalization in raw perceptual domains and offers a step towards developing precise computational models of inductive biases in language evolution.
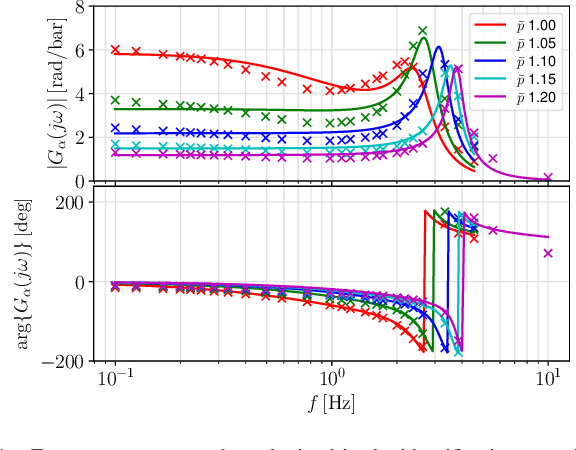
Offset-free Model Predictive Control: A Ball Catching Application with a Spherical Soft Robotic Arm
Mar 12, 2021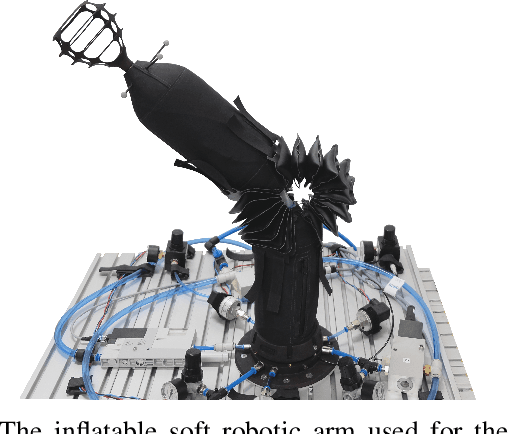

This paper presents an offset-free model predictive controller for fast and accurate control of a spherical soft robotic arm. In this control scheme, a linear model is combined with an online disturbance estimation technique to systematically compensate model deviations. Dynamic effects such as material relaxation resulting from the use of soft materials can be addressed to achieve offset-free tracking. The tracking error can be reduced by 35% when compared to a standard model predictive controller without a disturbance compensation scheme. The improved tracking performance enables the realization of a ball catching application, where the spherical soft robotic arm can catch a ball thrown by a human.
A Vision-based Sensing Approach for a Spherical Soft Robotic Arm
Dec 11, 2020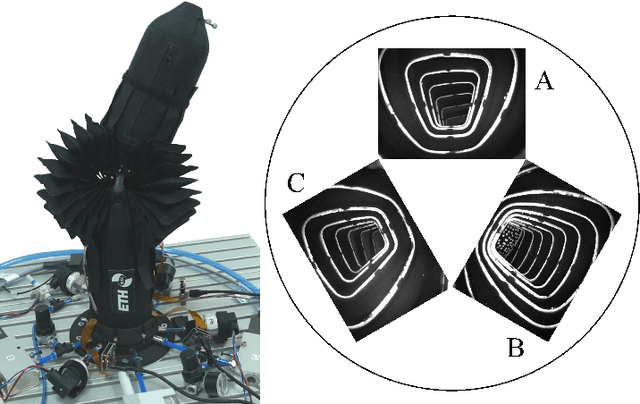


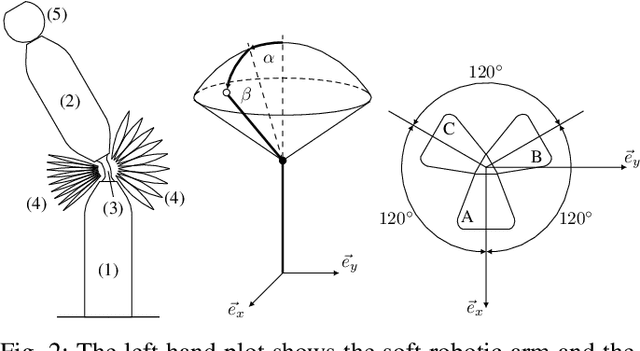
Sensory feedback is essential for the control of soft robotic systems and to enable deployment in a variety of different tasks. Proprioception refers to sensing the robot's own state and is of crucial importance in order to deploy soft robotic systems outside of laboratory environments, i.e. where no external sensing, such as motion capture systems, is available. A vision-based sensing approach for a soft robotic arm made from fabric is presented, leveraging the high-resolution sensory feedback provided by cameras. No mechanical interaction between the sensor and the soft structure is required and consequently, the compliance of the soft system is preserved. The integration of a camera into an inflatable, fabric-based bellow actuator is discussed. Three actuators, each featuring an integrated camera, are used to control the spherical robotic arm and simultaneously provide sensory feedback of the two rotational degrees of freedom. A convolutional neural network architecture predicts the two angles describing the robot's orientation from the camera images. Ground truth data is provided by a motion capture system during the training phase of the supervised learning approach and its evaluation thereafter. The camera-based sensing approach is able to provide estimates of the orientation in real-time with an accuracy of about one degree. The reliability of the sensing approach is demonstrated by using the sensory feedback to control the orientation of the robotic arm in closed-loop.
A Fast and Reliable Pick-and-Place Application with a Spherical Soft Robotic Arm
Nov 09, 2020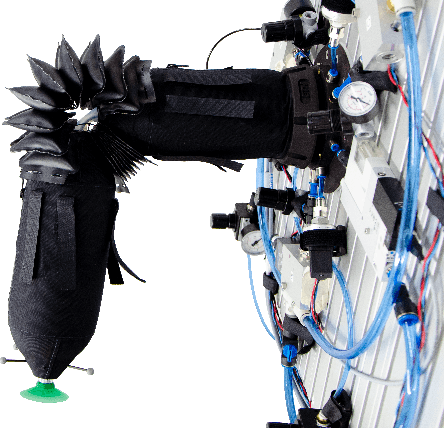
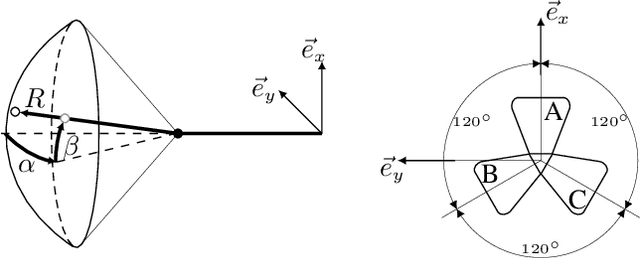
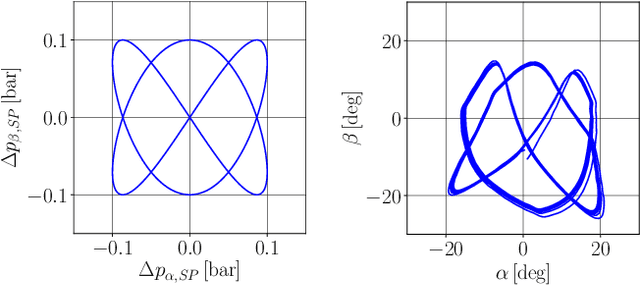
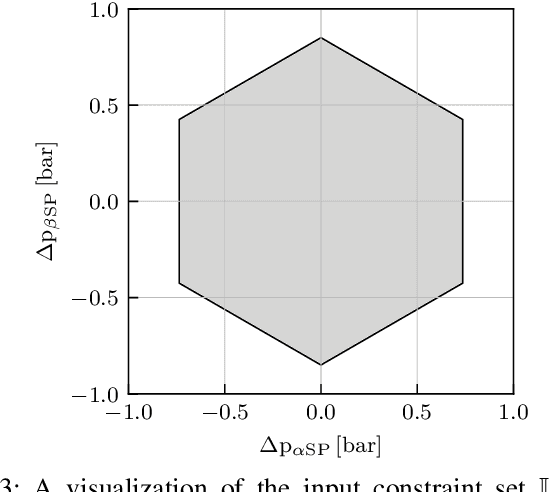
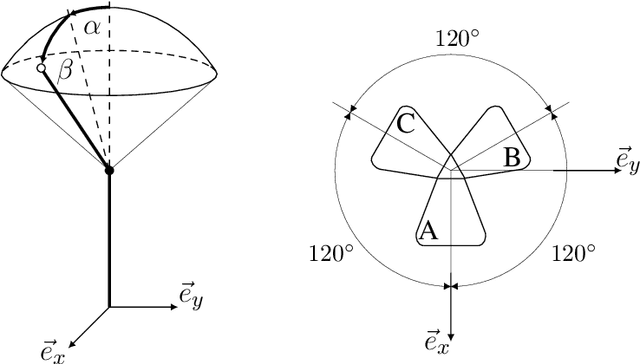
This paper presents the application of a learning control approach for the realization of a fast and reliable pick-and-place application with a spherical soft robotic arm. The arm is characterized by a lightweight design and exhibits compliant behavior due to the soft materials deployed. A soft, continuum joint is employed, which allows for simultaneous control of one translational and two rotational degrees of freedom in a single joint. This allows us to axially approach and pick an object with the attached suction cup during the pick-and-place application. An analytical mapping based on pressure differences and the antagonistic actuator configuration is introduced, allowing decoupling of the system dynamics and simplifying the modeling and control. A linear parameter-varying model is identified, which is parametrized by the attached load mass and a parameter related to the joint stiffness. A gain-scheduled feedback controller is proposed, which asymptotically stabilizes the robotic system for aggressive tuning and over large variations of the parameters considered. The control architecture is augmented with an iterative learning control scheme enabling accurate tracking of aggressive trajectories involving set point transitions of 60 degrees within 0.3 seconds (no mass attached) to 0.6 seconds (load mass attached). The modeling and control approach proposed results in a reliable realization of a pick-and-place application and is experimentally demonstrated.
Vision-Based Proprioceptive Sensing for Soft Inflatable Actuators
Sep 19, 2019



This paper presents a vision-based sensing approach for a soft linear actuator, which is equipped with an integrated camera. The proposed vision-based sensing pipeline predicts the three-dimensional position of a point of interest on the actuator. To train and evaluate the algorithm, predictions are compared to ground truth data from an external motion capture system. An off-the-shelf distance sensor is integrated in a similar actuator and its performance is used as a baseline for comparison. The resulting sensing pipeline runs at 40 Hz in real-time on a standard laptop and is additionally used for closed loop elongation control of the actuator. It is shown that the approach can achieve comparable accuracy to the distance sensor.
Iterative Learning Control for Fast and Accurate Position Tracking with a Soft Robotic Arm
Mar 04, 2019



This paper presents the application of an iterative learning control scheme to improve the position tracking performance for a soft robotic arm during aggressive maneuvers. Two antagonistically arranged, inflatable bellows actuate the robotic arm and provide high compliance while enabling fast actuation. Low-cost switching valves are used for pressure control of the soft actuators. A norm-optimal iterative learning control scheme based on a linear model of the system is presented and applied in parallel with a feedback controller. The learning scheme is experimentally evaluated on an aggressive trajectory involving set point shifts of 60 degrees within 0.2 seconds. The effectiveness of the learning approach is demonstrated by a reduction of the root-mean-square tracking error from 13 degrees to less than 2 degrees after applying the learning scheme for less than 30 iterations.
Comparing Models of Associative Meaning: An Empirical Investigation of Reference in Simple Language Games
Oct 08, 2018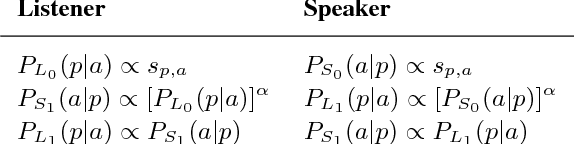
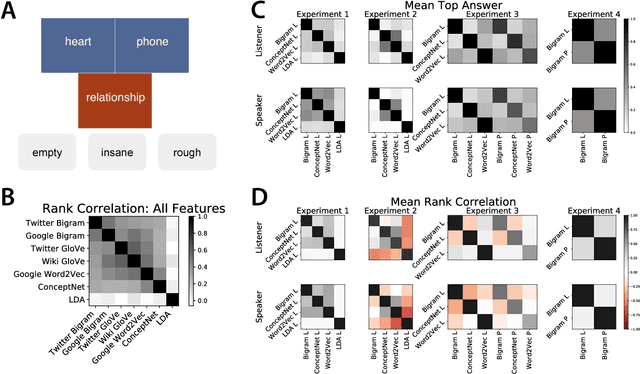
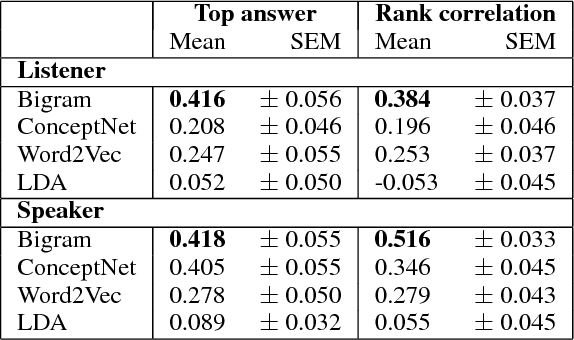
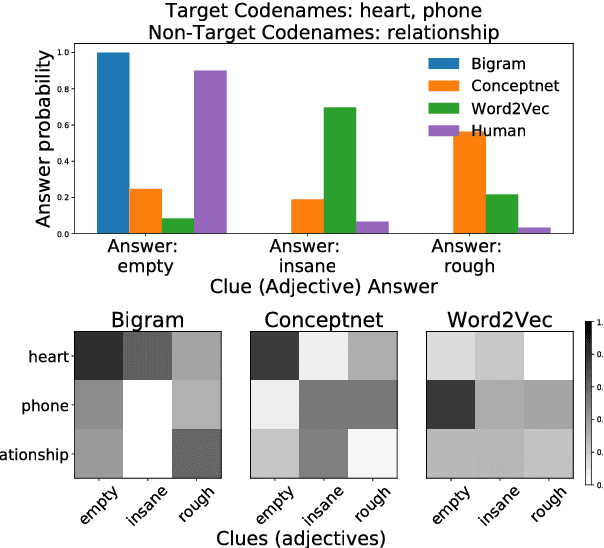
Simple reference games are of central theoretical and empirical importance in the study of situated language use. Although language provides rich, compositional truth-conditional semantics to facilitate reference, speakers and listeners may sometimes lack the overall lexical and cognitive resources to guarantee successful reference through these means alone. However, language also has rich associational structures that can serve as a further resource for achieving successful reference. Here we investigate this use of associational information in a setting where only associational information is available: a simplified version of the popular game Codenames. Using optimal experiment design techniques, we compare a range of models varying in the type of associative information deployed and in level of pragmatic sophistication against human behavior. In this setting, we find that listeners' behavior reflects direct bigram collocational associations more strongly than word-embedding or semantic knowledge graph-based associations and that there is little evidence for pragmatically sophisticated behavior by either speakers or listeners of the type that might be predicted by recursive-reasoning models such as the Rational Speech Acts theory. These results shed light on the nature of the lexical resources that speakers and listeners can bring to bear in achieving reference through associative meaning alone.