 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Dynamic Swing-Up of an Inverted Pendulum using Remote Magnetic Actuation
Jun 11, 2026Electromagnetic Navigation Systems (eMNS) have gained considerable attention for minimally invasive surgery and targeted drug delivery. While most of the literature relies on quasi-static control of these systems, recent work has demonstrated the benefits of dynamic approaches. However, trajectory tracking far from equilibrium states remains largely unaddressed. We close this gap by demonstrating the first swing-up of a magnetically actuated inverted pendulum using the clinically-ready Navion eMNS. Although the inverted pendulum is not clinically relevant in itself, the proposed method utilizes torques and forces as control objectives, making it applicable to other magnetically actuated devices such as catheters and guidewires. Our approach combines trajectory optimization that accounts for internal eMNS dynamics with time-varying Linear Quadratic Regulator (LQR) state feedback and Iterative Learning Control (ILC), which leverages previous trial data and the system's dynamic model to progressively refine the feedforward command. While LQR alone fails due to the complex phenomena of magnetic actuation, ILC enables successful swing-up within six iterations. Furthermore, post-experimental analysis reveals that the learned ILC correction closely matches the torque discrepancy predicted by high-fidelity magnetic field model calibration, suggesting learning and adaptation as a promising tool to deal with uncertainties in electromagnetic actuation arising, e.g., from patient-specific physiological motion patterns and field model calibration inaccuracies.
A Fast and Reliable Pick-and-Place Application with a Spherical Soft Robotic Arm
Nov 09, 2020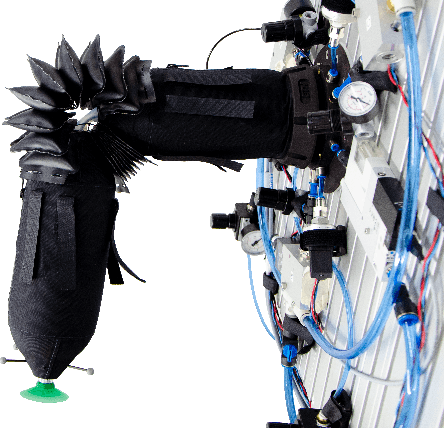
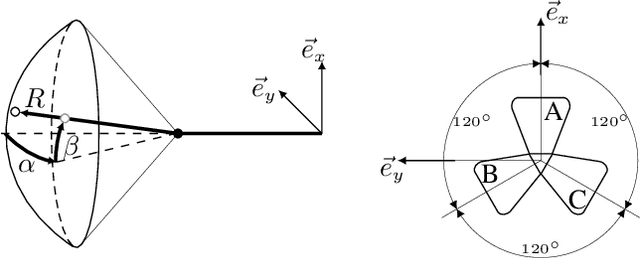
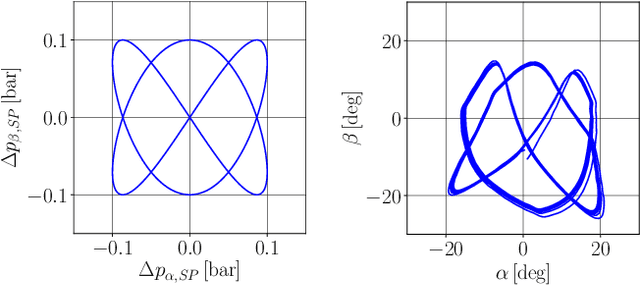
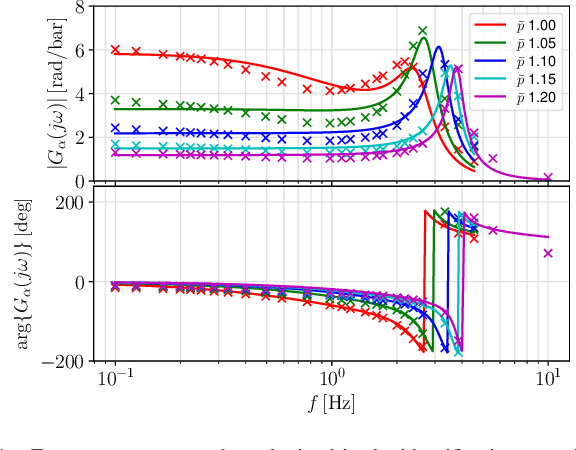
This paper presents the application of a learning control approach for the realization of a fast and reliable pick-and-place application with a spherical soft robotic arm. The arm is characterized by a lightweight design and exhibits compliant behavior due to the soft materials deployed. A soft, continuum joint is employed, which allows for simultaneous control of one translational and two rotational degrees of freedom in a single joint. This allows us to axially approach and pick an object with the attached suction cup during the pick-and-place application. An analytical mapping based on pressure differences and the antagonistic actuator configuration is introduced, allowing decoupling of the system dynamics and simplifying the modeling and control. A linear parameter-varying model is identified, which is parametrized by the attached load mass and a parameter related to the joint stiffness. A gain-scheduled feedback controller is proposed, which asymptotically stabilizes the robotic system for aggressive tuning and over large variations of the parameters considered. The control architecture is augmented with an iterative learning control scheme enabling accurate tracking of aggressive trajectories involving set point transitions of 60 degrees within 0.3 seconds (no mass attached) to 0.6 seconds (load mass attached). The modeling and control approach proposed results in a reliable realization of a pick-and-place application and is experimentally demonstrated.