 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM$^2$FMoE: Multi-Resolution Multi-View Frequency Mixture-of-Experts for Extreme-Adaptive Time Series Forecasting
Jan 13, 2026Forecasting time series with extreme events is critical yet challenging due to their high variance, irregular dynamics, and sparse but high-impact nature. While existing methods excel in modeling dominant regular patterns, their performance degrades significantly during extreme events, constituting the primary source of forecasting errors in real-world applications. Although some approaches incorporate auxiliary signals to improve performance, they still fail to capture extreme events' complex temporal dynamics. To address these limitations, we propose M$^2$FMoE, an extreme-adaptive forecasting model that learns both regular and extreme patterns through multi-resolution and multi-view frequency modeling. It comprises three modules: (1) a multi-view frequency mixture-of-experts module assigns experts to distinct spectral bands in Fourier and Wavelet domains, with cross-view shared band splitter aligning frequency partitions and enabling inter-expert collaboration to capture both dominant and rare fluctuations; (2) a multi-resolution adaptive fusion module that hierarchically aggregates frequency features from coarse to fine resolutions, enhancing sensitivity to both short-term variations and sudden changes; (3) a temporal gating integration module that dynamically balances long-term trends and short-term frequency-aware features, improving adaptability to both regular and extreme temporal patterns. Experiments on real-world hydrological datasets with extreme patterns demonstrate that M$^2$FMoE outperforms state-of-the-art baselines without requiring extreme-event labels.
Multiscale Spatio-Temporal Enhanced Short-term Load Forecasting of Electric Vehicle Charging Stations
May 29, 2024


The rapid expansion of electric vehicles (EVs) has rendered the load forecasting of electric vehicle charging stations (EVCS) increasingly critical. The primary challenge in achieving precise load forecasting for EVCS lies in accounting for the nonlinear of charging behaviors, the spatial interactions among different stations, and the intricate temporal variations in usage patterns. To address these challenges, we propose a Multiscale Spatio-Temporal Enhanced Model (MSTEM) for effective load forecasting at EVCS. MSTEM incorporates a multiscale graph neural network to discern hierarchical nonlinear temporal dependencies across various time scales. Besides, it also integrates a recurrent learning component and a residual fusion mechanism, enhancing its capability to accurately capture spatial and temporal variations in charging patterns. The effectiveness of the proposed MSTEM has been validated through comparative analysis with six baseline models using three evaluation metrics. The case studies utilize real-world datasets for both fast and slow charging loads at EVCS in Perth, UK. The experimental results demonstrate the superiority of MSTEM in short-term continuous load forecasting for EVCS.
Offset-free Model Predictive Control: A Ball Catching Application with a Spherical Soft Robotic Arm
Mar 12, 2021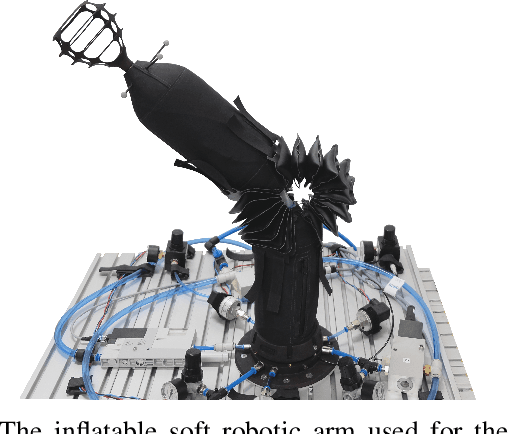
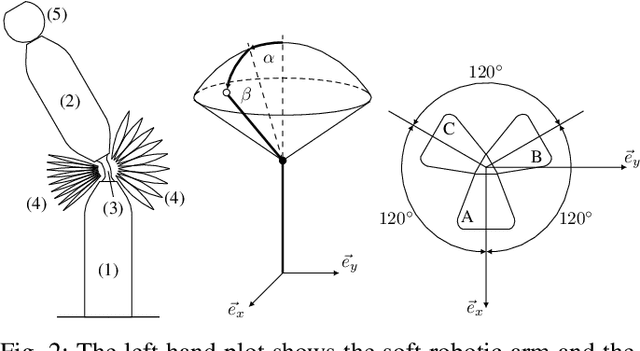
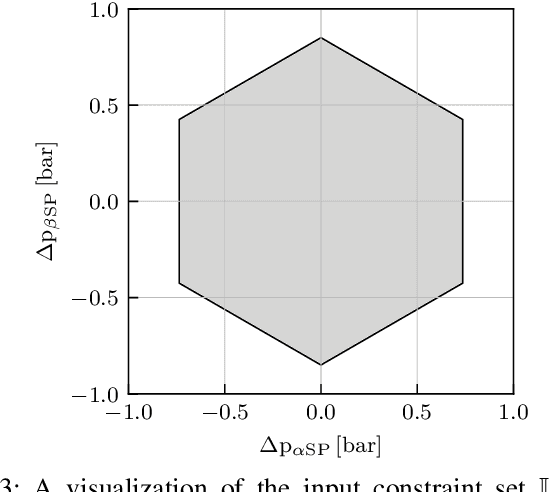

This paper presents an offset-free model predictive controller for fast and accurate control of a spherical soft robotic arm. In this control scheme, a linear model is combined with an online disturbance estimation technique to systematically compensate model deviations. Dynamic effects such as material relaxation resulting from the use of soft materials can be addressed to achieve offset-free tracking. The tracking error can be reduced by 35% when compared to a standard model predictive controller without a disturbance compensation scheme. The improved tracking performance enables the realization of a ball catching application, where the spherical soft robotic arm can catch a ball thrown by a human.