 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximately Optimal Global Planning for Contact-Rich SE(2) Manipulation on a Graph of Reachable Sets
Jan 15, 2026If we consider human manipulation, it is clear that contact-rich manipulation (CRM)-the ability to use any surface of the manipulator to make contact with objects-can be far more efficient and natural than relying solely on end-effectors (i.e., fingertips). However, state-of-the-art model-based planners for CRM are still focused on feasibility rather than optimality, limiting their ability to fully exploit CRM's advantages. We introduce a new paradigm that computes approximately optimal manipulator plans. This approach has two phases. Offline, we construct a graph of mutual reachable sets, where each set contains all object orientations reachable from a starting object orientation and grasp. Online, we plan over this graph, effectively computing and sequencing local plans for globally optimized motion. On a challenging, representative contact-rich task, our approach outperforms a leading planner, reducing task cost by 61%. It also achieves a 91% success rate across 250 queries and maintains sub-minute query times, ultimately demonstrating that globally optimized contact-rich manipulation is now practical for real-world tasks.
Dual-Arm Whole-Body Motion Planning: Leveraging Overlapping Kinematic Chains
Nov 11, 2025High degree-of-freedom dual-arm robots are becoming increasingly common due to their morphology enabling them to operate effectively in human environments. However, motion planning in real-time within unknown, changing environments remains a challenge for such robots due to the high dimensionality of the configuration space and the complex collision-avoidance constraints that must be obeyed. In this work, we propose a novel way to alleviate the curse of dimensionality by leveraging the structure imposed by shared joints (e.g. torso joints) in a dual-arm robot. First, we build two dynamic roadmaps (DRM) for each kinematic chain (i.e. left arm + torso, right arm + torso) with specific structure induced by the shared joints. Then, we show that we can leverage this structure to efficiently search through the composition of the two roadmaps and largely sidestep the curse of dimensionality. Finally, we run several experiments in a real-world grocery store with this motion planner on a 19 DoF mobile manipulation robot executing a grocery fulfillment task, achieving 0.4s average planning times with 99.9% success rate across more than 2000 motion plans.
Superfast Configuration-Space Convex Set Computation on GPUs for Online Motion Planning
Apr 15, 2025In this work, we leverage GPUs to construct probabilistically collision-free convex sets in robot configuration space on the fly. This extends the use of modern motion planning algorithms that leverage such representations to changing environments. These planners rapidly and reliably optimize high-quality trajectories, without the burden of challenging nonconvex collision-avoidance constraints. We present an algorithm that inflates collision-free piecewise linear paths into sequences of convex sets (SCS) that are probabilistically collision-free using massive parallelism. We then integrate this algorithm into a motion planning pipeline, which leverages dynamic roadmaps to rapidly find one or multiple collision-free paths, and inflates them. We then optimize the trajectory through the probabilistically collision-free sets, simultaneously using the candidate trajectory to detect and remove collisions from the sets. We demonstrate the efficacy of our approach on a simulation benchmark and a KUKA iiwa 7 robot manipulator with perception in the loop. On our benchmark, our approach runs 17.1 times faster and yields a 27.9% increase in reliability over the nonlinear trajectory optimization baseline, while still producing high-quality motion plans.
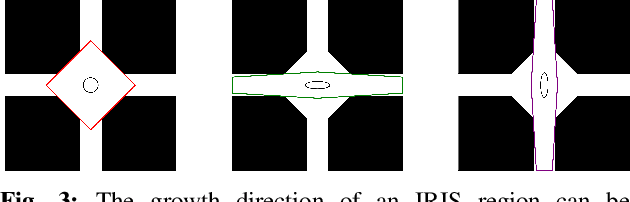
Faster Algorithms for Growing Collision-Free Convex Polytopes in Robot Configuration Space
Oct 16, 2024We propose two novel algorithms for constructing convex collision-free polytopes in robot configuration space. Finding these polytopes enables the application of stronger motion-planning frameworks such as trajectory optimization with Graphs of Convex Sets [1] and is currently a major roadblock in the adoption of these approaches. In this paper, we build upon IRIS-NP (Iterative Regional Inflation by Semidefinite & Nonlinear Programming) [2] to significantly improve tunability, runtimes, and scaling to complex environments. IRIS-NP uses nonlinear programming paired with uniform random initialization to find configurations on the boundary of the free configuration space. Our key insight is that finding near-by configuration-space obstacles using sampling is inexpensive and greatly accelerates region generation. We propose two algorithms using such samples to either employ nonlinear programming more efficiently (IRIS-NP2 ) or circumvent it altogether using a massively-parallel zero-order optimization strategy (IRIS-ZO). We also propose a termination condition that controls the probability of exceeding a user-specified permissible fraction-in-collision, eliminating a significant source of tuning difficulty in IRIS-NP. We compare performance across eight robot environments, showing that IRIS-ZO achieves an order-of-magnitude speed advantage over IRIS-NP. IRISNP2, also significantly faster than IRIS-NP, builds larger polytopes using fewer hyperplanes, enabling faster downstream computation. Website: https://sites.google.com/view/fastiris
Growing Q-Networks: Solving Continuous Control Tasks with Adaptive Control Resolution
Apr 05, 2024



Recent reinforcement learning approaches have shown surprisingly strong capabilities of bang-bang policies for solving continuous control benchmarks. The underlying coarse action space discretizations often yield favourable exploration characteristics while final performance does not visibly suffer in the absence of action penalization in line with optimal control theory. In robotics applications, smooth control signals are commonly preferred to reduce system wear and energy efficiency, but action costs can be detrimental to exploration during early training. In this work, we aim to bridge this performance gap by growing discrete action spaces from coarse to fine control resolution, taking advantage of recent results in decoupled Q-learning to scale our approach to high-dimensional action spaces up to dim(A) = 38. Our work indicates that an adaptive control resolution in combination with value decomposition yields simple critic-only algorithms that yield surprisingly strong performance on continuous control tasks.
Certifying Bimanual RRT Motion Plans in a Second
Oct 25, 2023We present an efficient method for certifying non-collision for piecewise-polynomial motion plans in algebraic reparametrizations of configuration space. Such motion plans include those generated by popular randomized methods including RRTs and PRMs, as well as those generated by many methods in trajectory optimization. Based on Sums-of-Squares optimization, our method provides exact, rigorous certificates of non-collision; it can never falsely claim that a motion plan containing collisions is collision-free. We demonstrate that our formulation is practical for real world deployment, certifying the safety of a twelve degree of freedom motion plan in just over a second. Moreover, the method is capable of discriminating the safety or lack thereof of two motion plans which differ by only millimeters.
Approximating Robot Configuration Spaces with few Convex Sets using Clique Covers of Visibility Graphs
Oct 04, 2023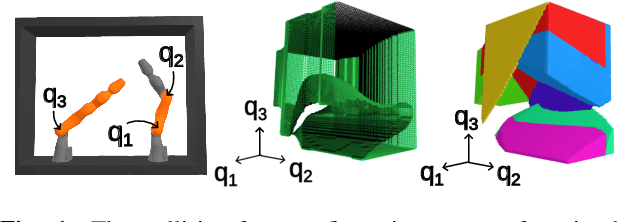

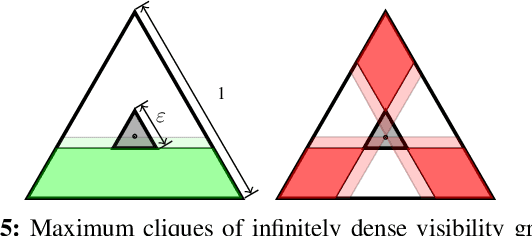
Many computations in robotics can be dramatically accelerated if the robot configuration space is described as a collection of simple sets. For example, recently developed motion planners rely on a convex decomposition of the free space to design collision-free trajectories using fast convex optimization. In this work, we present an efficient method for approximately covering complex configuration spaces with a small number of polytopes. The approach constructs a visibility graph using sampling and generates a clique cover of this graph to find clusters of samples that have mutual line of sight. These clusters are then inflated into large, full-dimensional, polytopes. We evaluate our method on a variety of robotic systems and show that it consistently covers larger portions of free configuration space, with fewer polytopes, and in a fraction of the time compared to previous methods.
Certified Polyhedral Decompositions of Collision-Free Configuration Space
Feb 23, 2023



Understanding the geometry of collision-free configuration space (C-free) in the presence of task-space obstacles is an essential ingredient for collision-free motion planning. While it is possible to check for collisions at a point using standard algorithms, to date no practical method exists for computing C-free regions with rigorous certificates due to the complexity of mapping task-space obstacles through the kinematics. In this work, we present the first to our knowledge rigorous method for approximately decomposing a rational parametrization of C-free into certified polyhedral regions. Our method, called C-IRIS (C-space Iterative Regional Inflation by Semidefinite programming), generates large, convex polytopes in a rational parameterization of the configuration space which are rigorously certified to be collision-free. Such regions have been shown to be useful for both optimization-based and randomized motion planning. Based on convex optimization, our method works in arbitrary dimensions, only makes assumptions about the convexity of the obstacles in the task space, and is fast enough to scale to realistic problems in manipulation. We demonstrate our algorithm's ability to fill a non-trivial amount of collision-free C-space in several 2-DOF examples where the C-space can be visualized, as well as the scalability of our algorithm on a 7-DOF KUKA iiwa, a 6-DOF UR3e and 12-DOF bimanual manipulators. An implementation of our algorithm is open-sourced in Drake. We furthermore provide examples of our algorithm in interactive Python notebooks.
Solving Continuous Control via Q-learning
Oct 22, 2022While there has been substantial success in applying actor-critic methods to continuous control, simpler critic-only methods such as Q-learning often remain intractable in the associated high-dimensional action spaces. However, most actor-critic methods come at the cost of added complexity: heuristics for stabilization, compute requirements as well as wider hyperparameter search spaces. We show that these issues can be largely alleviated via Q-learning by combining action discretization with value decomposition, framing single-agent control as cooperative multi-agent reinforcement learning (MARL). With bang-bang actions, performance of this critic-only approach matches state-of-the-art continuous actor-critic methods when learning from features or pixels. We extend classical bandit examples from cooperative MARL to provide intuition for how decoupled critics leverage state information to coordinate joint optimization, and demonstrate surprisingly strong performance across a wide variety of continuous control tasks.
Finding and Optimizing Certified, Collision-Free Regions in Configuration Space for Robot Manipulators
May 07, 2022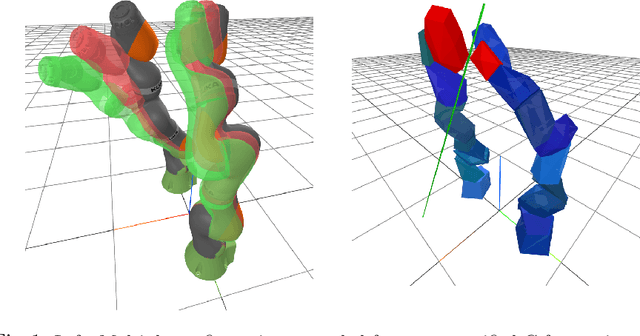
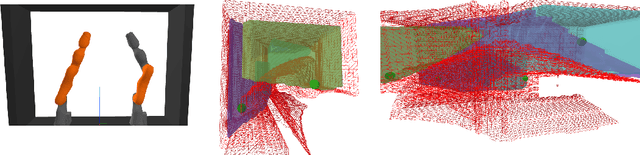
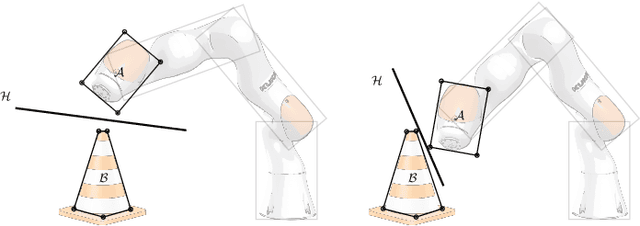
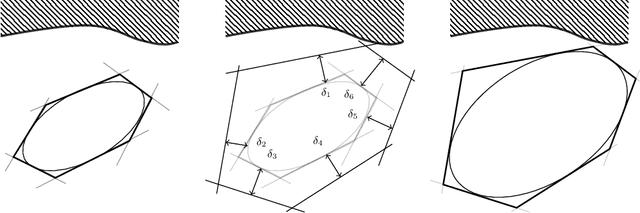
Configuration space (C-space) has played a central role in collision-free motion planning, particularly for robot manipulators. While it is possible to check for collisions at a point using standard algorithms, to date no practical method exists for computing collision-free C-space regions with rigorous certificates due to the complexities of mapping task-space obstacles through the kinematics. In this work, we present the first to our knowledge method for generating such regions and certificates through convex optimization. Our method, called C-Iris (C-space Iterative Regional Inflation by Semidefinite programming), generates large, convex polytopes in a rational parametrization of the configuration space which are guaranteed to be collision-free. Such regions have been shown to be useful for both optimization-based and randomized motion planning. Our regions are generated by alternating between two convex optimization problems: (1) a simultaneous search for a maximal-volume ellipse inscribed in a given polytope and a certificate that the polytope is collision-free and (2) a maximal expansion of the polytope away from the ellipse which does not violate the certificate. The volume of the ellipse and size of the polytope are allowed to grow over several iterations while being collision-free by construction. Our method works in arbitrary dimensions, only makes assumptions about the convexity of the obstacles in the task space, and scales to realistic problems in manipulation. We demonstrate our algorithm's ability to fill a non-trivial amount of collision-free C-space in a 3-DOF example where the C-space can be visualized, as well as the scalability of our algorithm on a 7-DOF KUKA iiwa and a 12-DOF bimanual manipulator.