 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA biconvex method for minimum-time motion planning through sequences of convex sets
Apr 26, 2025
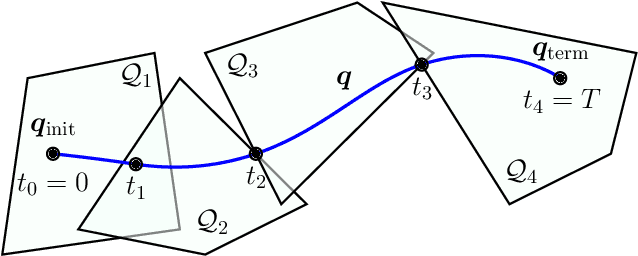
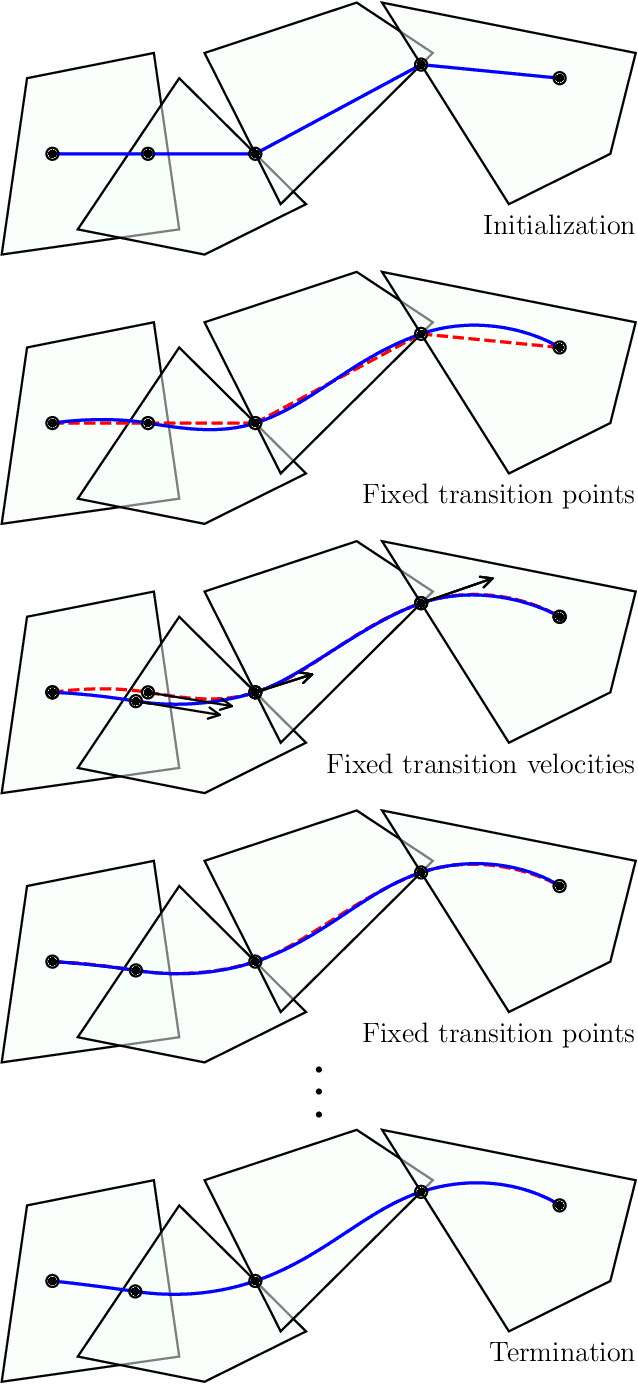
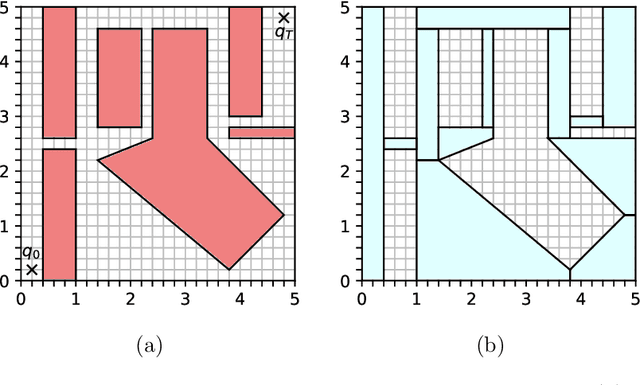
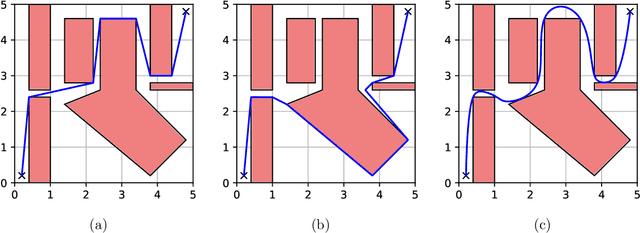
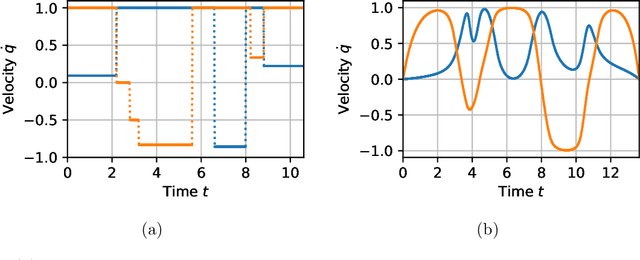
We consider the problem of designing a smooth trajectory that traverses a sequence of convex sets in minimum time, while satisfying given velocity and acceleration constraints. This problem is naturally formulated as a nonconvex program. To solve it, we propose a biconvex method that quickly produces an initial trajectory and iteratively refines it by solving two convex subproblems in alternation. This method is guaranteed to converge, returns a feasible trajectory even if stopped early, and does not require the selection of any line-search or trust-region parameter. Exhaustive experiments show that our method finds high-quality trajectories in a fraction of the time of state-of-the-art solvers for nonconvex optimization. In addition, it achieves runtimes comparable to industry-standard waypoint-based motion planners, while consistently designing lower-duration trajectories than existing optimization-based planners.
A New Semidefinite Relaxation for Linear and Piecewise-Affine Optimal Control with Time Scaling
Apr 17, 2025We introduce a semidefinite relaxation for optimal control of linear systems with time scaling. These problems are inherently nonconvex, since the system dynamics involves bilinear products between the discretization time step and the system state and controls. The proposed relaxation is closely related to the standard second-order semidefinite relaxation for quadratic constraints, but we carefully select a subset of the possible bilinear terms and apply a change of variables to achieve empirically tight relaxations while keeping the computational load light. We further extend our method to handle piecewise-affine (PWA) systems by formulating the PWA optimal-control problem as a shortest-path problem in a graph of convex sets (GCS). In this GCS, different paths represent different mode sequences for the PWA system, and the convex sets model the relaxed dynamics within each mode. By combining a tight convex relaxation of the GCS problem with our semidefinite relaxation with time scaling, we can solve PWA optimal-control problems through a single semidefinite program.
Improved Sample Complexity of Imitation Learning for Barrier Model Predictive Control
Oct 01, 2024


Recent work in imitation learning has shown that having an expert controller that is both suitably smooth and stable enables stronger guarantees on the performance of the learned controller. However, constructing such smoothed expert controllers for arbitrary systems remains challenging, especially in the presence of input and state constraints. As our primary contribution, we show how such a smoothed expert can be designed for a general class of systems using a log-barrier-based relaxation of a standard Model Predictive Control (MPC) optimization problem. Improving upon our previous work, we show that barrier MPC achieves theoretically optimal error-to-smoothness tradeoff along some direction. At the core of this theoretical guarantee on smoothness is an improved lower bound we prove on the optimality gap of the analytic center associated with a convex Lipschitz function, which we believe could be of independent interest. We validate our theoretical findings via experiments, demonstrating the merits of our smoothing approach over randomized smoothing.
Multi-Query Shortest-Path Problem in Graphs of Convex Sets
Sep 29, 2024



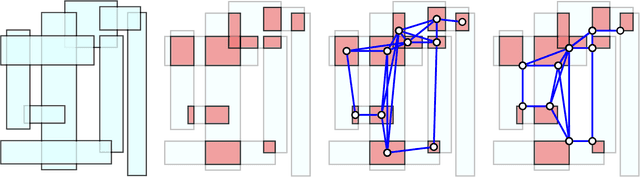
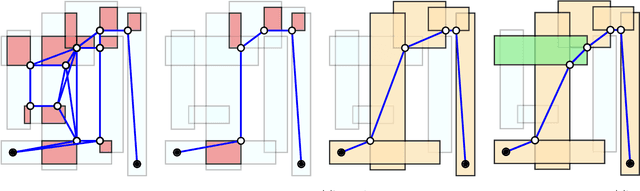
The Shortest-Path Problem in Graph of Convex Sets (SPP in GCS) is a recently developed optimization framework that blends discrete and continuous decision making. Many relevant problems in robotics, such as collision-free motion planning, can be cast and solved as an SPP in GCS, yielding lower-cost solutions and faster runtimes than state-of-the-art algorithms. In this paper, we are motivated by motion planning of robot arms that must operate swiftly in static environments. We consider a multi-query extension of the SPP in GCS, where the goal is to efficiently precompute optimal paths between given sets of initial and target conditions. Our solution consists of two stages. Offline, we use semidefinite programming to compute a coarse lower bound on the problem's cost-to-go function. Then, online, this lower bound is used to incrementally generate feasible paths by solving short-horizon convex programs. For a robot arm with seven joints, our method designs higher quality trajectories up to two orders of magnitude faster than existing motion planners.
Towards Tight Convex Relaxations for Contact-Rich Manipulation
Feb 15, 2024We present a method for global motion planning of robotic systems that interact with the environment through contacts. Our method directly handles the hybrid nature of such tasks using tools from convex optimization. We formulate the motion-planning problem as a shortest-path problem in a graph of convex sets, where a path in the graph corresponds to a contact sequence and a convex set models the quasi-static dynamics within a fixed contact mode. For each contact mode, we use semidefinite programming to relax the nonconvex dynamics that results from the simultaneous optimization of the object's pose, contact locations, and contact forces. The result is a tight convex relaxation of the overall planning problem, that can be efficiently solved and quickly rounded to find a feasible contact-rich trajectory. As a first application of this technique, we focus on the task of planar pushing. Exhaustive experiments show that our convex-optimization method generates plans that are consistently within a small percentage of the global optimum. We demonstrate the quality of these plans on a real robotic system.
Model-Based Control with Sparse Neural Dynamics
Dec 20, 2023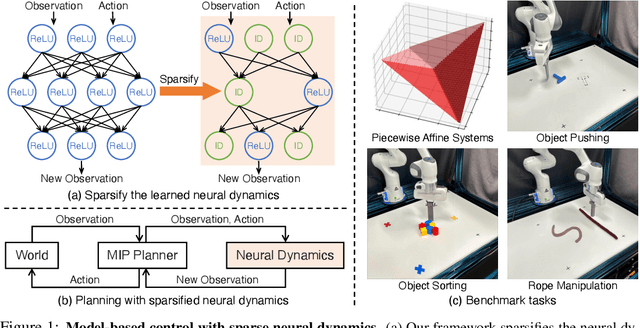
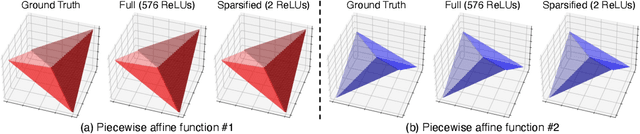
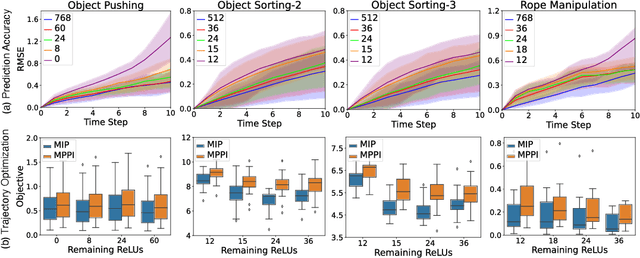
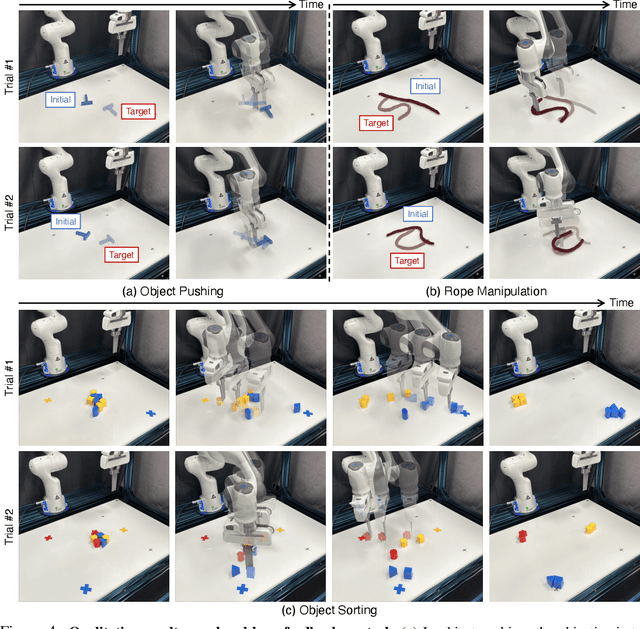
Learning predictive models from observations using deep neural networks (DNNs) is a promising new approach to many real-world planning and control problems. However, common DNNs are too unstructured for effective planning, and current control methods typically rely on extensive sampling or local gradient descent. In this paper, we propose a new framework for integrated model learning and predictive control that is amenable to efficient optimization algorithms. Specifically, we start with a ReLU neural model of the system dynamics and, with minimal losses in prediction accuracy, we gradually sparsify it by removing redundant neurons. This discrete sparsification process is approximated as a continuous problem, enabling an end-to-end optimization of both the model architecture and the weight parameters. The sparsified model is subsequently used by a mixed-integer predictive controller, which represents the neuron activations as binary variables and employs efficient branch-and-bound algorithms. Our framework is applicable to a wide variety of DNNs, from simple multilayer perceptrons to complex graph neural dynamics. It can efficiently handle tasks involving complicated contact dynamics, such as object pushing, compositional object sorting, and manipulation of deformable objects. Numerical and hardware experiments show that, despite the aggressive sparsification, our framework can deliver better closed-loop performance than existing state-of-the-art methods.
Approximating Robot Configuration Spaces with few Convex Sets using Clique Covers of Visibility Graphs
Oct 04, 2023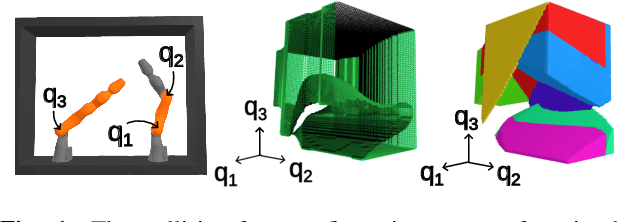

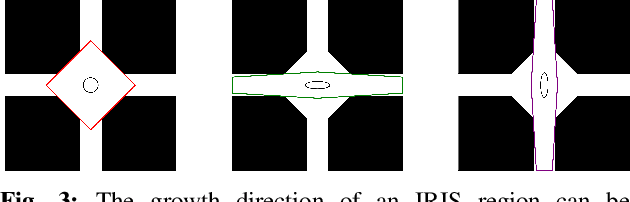
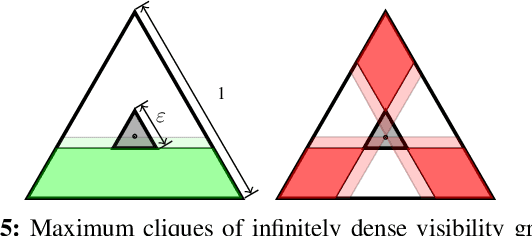
Many computations in robotics can be dramatically accelerated if the robot configuration space is described as a collection of simple sets. For example, recently developed motion planners rely on a convex decomposition of the free space to design collision-free trajectories using fast convex optimization. In this work, we present an efficient method for approximately covering complex configuration spaces with a small number of polytopes. The approach constructs a visibility graph using sampling and generates a clique cover of this graph to find clusters of samples that have mutual line of sight. These clusters are then inflated into large, full-dimensional, polytopes. We evaluate our method on a variety of robotic systems and show that it consistently covers larger portions of free configuration space, with fewer polytopes, and in a fraction of the time compared to previous methods.
Smooth Model Predictive Control with Applications to Statistical Learning
Jun 02, 2023


Statistical learning theory and high dimensional statistics have had a tremendous impact on Machine Learning theory and have impacted a variety of domains including systems and control theory. Over the past few years we have witnessed a variety of applications of such theoretical tools to help answer questions such as: how many state-action pairs are needed to learn a static control policy to a given accuracy? Recent results have shown that continuously differentiable and stabilizing control policies can be well-approximated using neural networks with hard guarantees on performance, yet often even the simplest constrained control problems are not smooth. To address this void, in this paper we study smooth approximations of linear Model Predictive Control (MPC) policies, in which hard constraints are replaced by barrier functions, a.k.a. barrier MPC. In particular, we show that barrier MPC inherits the exponential stability properties of the original non-smooth MPC policy. Using a careful analysis of the proposed barrier MPC, we show that its smoothness constant can be carefully controlled, thereby paving the way for new sample complexity results for approximating MPC policies from sampled state-action pairs.
Fast Path Planning Through Large Collections of Safe Boxes
May 01, 2023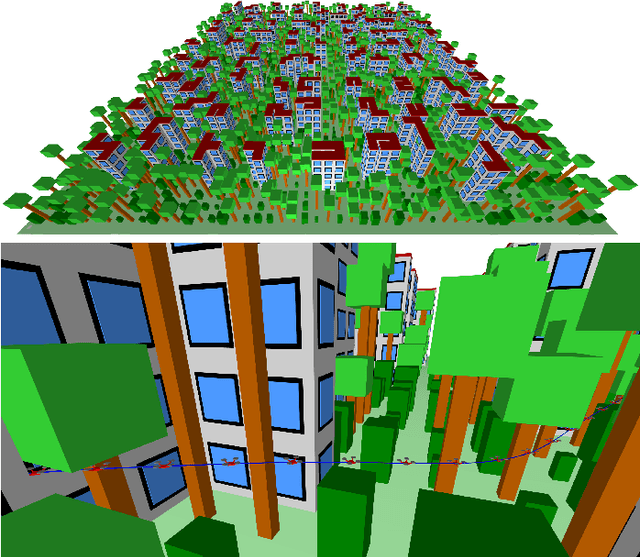
We present a fast algorithm for the design of smooth paths (or trajectories) that are constrained to lie in a collection of axis-aligned boxes. We consider the case where the number of these safe boxes is large, and basic preprocessing of them (such as finding their intersections) can be done offline. At runtime we quickly generate a smooth path between given initial and terminal positions. Our algorithm designs trajectories that are guaranteed to be safe at all times, and it detects infeasibility whenever such a trajectory does not exist. Our algorithm is based on two subproblems that we can solve very efficiently: finding a shortest path in a weighted graph, and solving (multiple) convex optimal control problems. We demonstrate the proposed path planner on large-scale numerical examples, and we provide an efficient open-source software implementation, fastpathplanning.
Motion Planning around Obstacles with Convex Optimization
May 09, 2022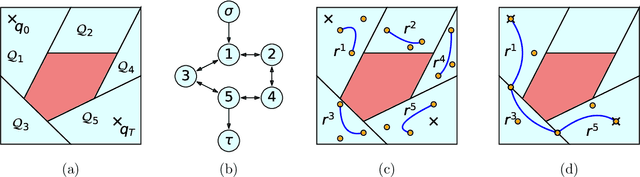
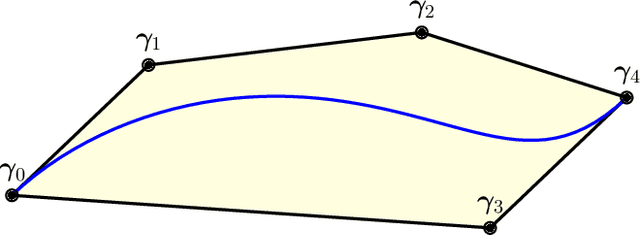
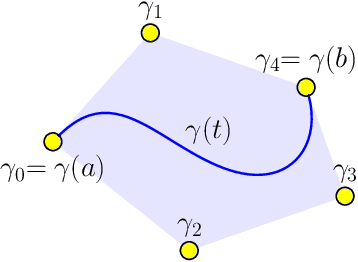
Trajectory optimization offers mature tools for motion planning in high-dimensional spaces under dynamic constraints. However, when facing complex configuration spaces, cluttered with obstacles, roboticists typically fall back to sampling-based planners that struggle in very high dimensions and with continuous differential constraints. Indeed, obstacles are the source of many textbook examples of problematic nonconvexities in the trajectory-optimization problem. Here we show that convex optimization can, in fact, be used to reliably plan trajectories around obstacles. Specifically, we consider planning problems with collision-avoidance constraints, as well as cost penalties and hard constraints on the shape, the duration, and the velocity of the trajectory. Combining the properties of B\'ezier curves with a recently-proposed framework for finding shortest paths in Graphs of Convex Sets (GCS), we formulate the planning problem as a compact mixed-integer optimization. In stark contrast with existing mixed-integer planners, the convex relaxation of our programs is very tight, and a cheap rounding of its solution is typically sufficient to design globally-optimal trajectories. This reduces the mixed-integer program back to a simple convex optimization, and automatically provides optimality bounds for the planned trajectories. We name the proposed planner GCS, after its underlying optimization framework. We demonstrate GCS in simulation on a variety of robotic platforms, including a quadrotor flying through buildings and a dual-arm manipulator (with fourteen degrees of freedom) moving in a confined space. Using numerical experiments on a seven-degree-of-freedom manipulator, we show that GCS can outperform widely-used sampling-based planners by finding higher-quality trajectories in less time.