 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximately Optimal Global Planning for Contact-Rich SE(2) Manipulation on a Graph of Reachable Sets
Jan 15, 2026If we consider human manipulation, it is clear that contact-rich manipulation (CRM)-the ability to use any surface of the manipulator to make contact with objects-can be far more efficient and natural than relying solely on end-effectors (i.e., fingertips). However, state-of-the-art model-based planners for CRM are still focused on feasibility rather than optimality, limiting their ability to fully exploit CRM's advantages. We introduce a new paradigm that computes approximately optimal manipulator plans. This approach has two phases. Offline, we construct a graph of mutual reachable sets, where each set contains all object orientations reachable from a starting object orientation and grasp. Online, we plan over this graph, effectively computing and sequencing local plans for globally optimized motion. On a challenging, representative contact-rich task, our approach outperforms a leading planner, reducing task cost by 61%. It also achieves a 91% success rate across 250 queries and maintains sub-minute query times, ultimately demonstrating that globally optimized contact-rich manipulation is now practical for real-world tasks.
Physics-Driven Data Generation for Contact-Rich Manipulation via Trajectory Optimization
Feb 27, 2025



We present a low-cost data generation pipeline that integrates physics-based simulation, human demonstrations, and model-based planning to efficiently generate large-scale, high-quality datasets for contact-rich robotic manipulation tasks. Starting with a small number of embodiment-flexible human demonstrations collected in a virtual reality simulation environment, the pipeline refines these demonstrations using optimization-based kinematic retargeting and trajectory optimization to adapt them across various robot embodiments and physical parameters. This process yields a diverse, physically consistent dataset that enables cross-embodiment data transfer, and offers the potential to reuse legacy datasets collected under different hardware configurations or physical parameters. We validate the pipeline's effectiveness by training diffusion policies from the generated datasets for challenging contact-rich manipulation tasks across multiple robot embodiments, including a floating Allegro hand and bimanual robot arms. The trained policies are deployed zero-shot on hardware for bimanual iiwa arms, achieving high success rates with minimal human input. Project website: https://lujieyang.github.io/physicsgen/.
Multi-Query Shortest-Path Problem in Graphs of Convex Sets
Sep 29, 2024



The Shortest-Path Problem in Graph of Convex Sets (SPP in GCS) is a recently developed optimization framework that blends discrete and continuous decision making. Many relevant problems in robotics, such as collision-free motion planning, can be cast and solved as an SPP in GCS, yielding lower-cost solutions and faster runtimes than state-of-the-art algorithms. In this paper, we are motivated by motion planning of robot arms that must operate swiftly in static environments. We consider a multi-query extension of the SPP in GCS, where the goal is to efficiently precompute optimal paths between given sets of initial and target conditions. Our solution consists of two stages. Offline, we use semidefinite programming to compute a coarse lower bound on the problem's cost-to-go function. Then, online, this lower bound is used to incrementally generate feasible paths by solving short-horizon convex programs. For a robot arm with seven joints, our method designs higher quality trajectories up to two orders of magnitude faster than existing motion planners.
GCS*: Forward Heuristic Search on Implicit Graphs of Convex Sets
Jul 11, 2024
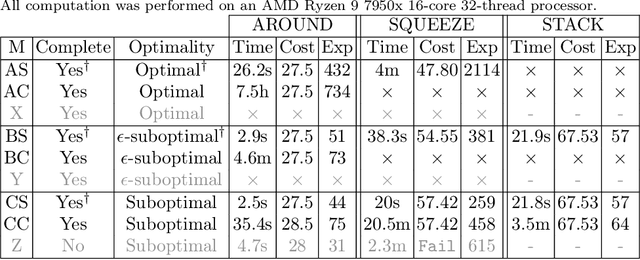
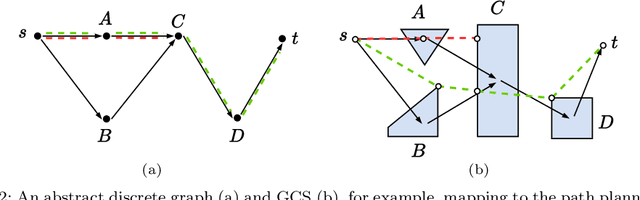
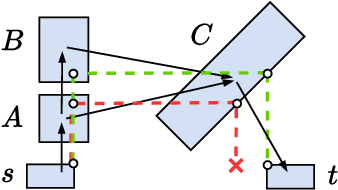
We consider large-scale, implicit-search-based solutions to the Shortest Path Problems on Graphs of Convex Sets (GCS). We propose GCS*, a forward heuristic search algorithm that generalizes A* search to the GCS setting, where a continuous-valued decision is made at each graph vertex, and constraints across graph edges couple these decisions, influencing costs and feasibility. Such mixed discrete-continuous planning is needed in many domains, including motion planning around obstacles and planning through contact. This setting provides a unique challenge for best-first search algorithms: the cost and feasibility of a path depend on continuous-valued points chosen along the entire path. We show that by pruning paths that are cost-dominated over their entire terminal vertex, GCS* can search efficiently while still guaranteeing cost optimality and completeness. To find satisficing solutions quickly, we also present a complete but suboptimal variation, pruning instead reachability-dominated paths. We implement these checks using polyhedral-containment or sampling-based methods. The sampling-based implementation is probabilistically complete and asymptotically cost optimal, and performs effectively even with minimal samples in practice. We demonstrate GCS* on planar pushing tasks where the combinatorial explosion of contact modes renders prior methods intractable and show it performs favorably compared to the state-of-the-art. Project website: https://shaoyuan.cc/research/gcs-star/