 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhich Reconstruction Model Should a Robot Use? Routing Image-to-3D Models for Cost-Aware Robotic Manipulation
Mar 29, 2026Robotic manipulation tasks require 3D mesh reconstructions of varying quality: dexterous manipulation demands fine-grained surface detail, while collision-free planning tolerates coarser representations. Multiple reconstruction methods offer different cost-quality tradeoffs, from Image-to-3D models - whose output quality depends heavily on the input viewpoint - to view-invariant methods such as structured light scanning. Querying all models is computationally prohibitive, motivating per-input model selection. We propose SCOUT, a novel routing framework that decouples reconstruction scores into two components: (1) the relative performance of viewpoint-dependent models, captured by a learned probability distribution, and (2) the overall image difficulty, captured by a scalar partition function estimate. As the learned network operates only over the viewpoint-dependent models, view-invariant pipelines can be added, removed, or reconfigured without retraining. SCOUT also supports arbitrary cost constraints at inference time, accommodating the multi-dimensional cost constraints common in robotics. We evaluate on the Google Scanned Objects, BigBIRD, and YCB datasets under multiple mesh quality metrics, demonstrating consistent improvements over routing baselines adapted from the LLM literature across various cost constraints. We further validate the framework through robotic grasping and dexterous manipulation experiments. We release the code and additional results on our website.
TiPToP: A Modular Open-Vocabulary Planning System for Robotic Manipulation
Mar 10, 2026We present TiPToP, an extensible modular system that combines pretrained vision foundation models with an existing Task and Motion Planner (TAMP) to solve multi-step manipulation tasks directly from input RGB images and natural-language instructions. Our system aims to be simple and easy-to-use: it can be installed and run on a standard DROID setup in under one hour and adapted to new embodiments with minimal effort. We evaluate TiPToP -- which requires zero robot data -- over 28 tabletop manipulation tasks in simulation and the real world and find it matches or outperforms $π_{0.5}\text{-DROID}$, a vision-language-action (VLA) model fine-tuned on 350 hours of embodiment-specific demonstrations. TiPToP's modular architecture enables us to analyze the system's failure modes at the component level. We analyze results from an evaluation of 173 trials and identify directions for improvement. We release TiPToP open-source to further research on modular manipulation systems and tighter integration between learning and planning. Project website and code: https://tiptop-robot.github.io
Rational Inverse Reasoning
Aug 12, 2025


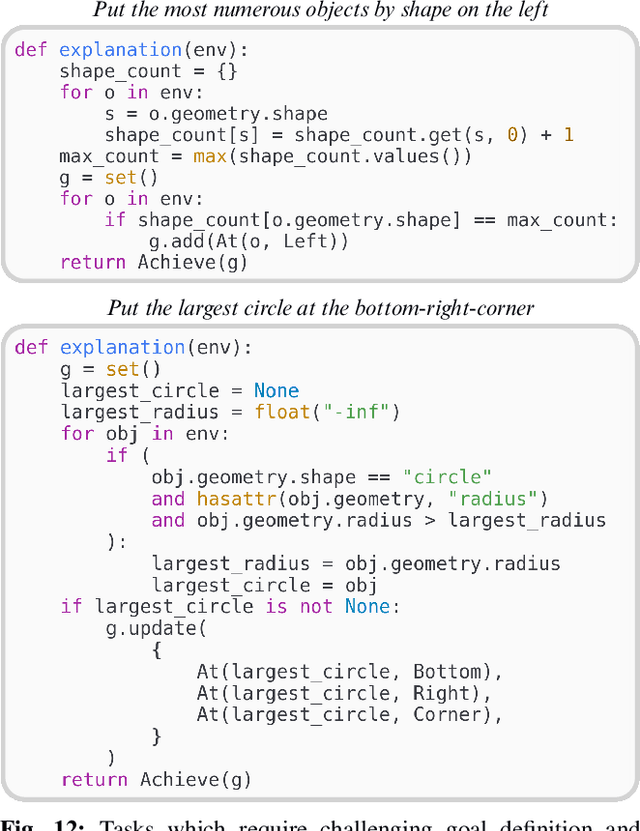
Humans can observe a single, imperfect demonstration and immediately generalize to very different problem settings. Robots, in contrast, often require hundreds of examples and still struggle to generalize beyond the training conditions. We argue that this limitation arises from the inability to recover the latent explanations that underpin intelligent behavior, and that these explanations can take the form of structured programs consisting of high-level goals, sub-task decomposition, and execution constraints. In this work, we introduce Rational Inverse Reasoning (RIR), a framework for inferring these latent programs through a hierarchical generative model of behavior. RIR frames few-shot imitation as Bayesian program induction: a vision-language model iteratively proposes structured symbolic task hypotheses, while a planner-in-the-loop inference scheme scores each by the likelihood of the observed demonstration under that hypothesis. This loop yields a posterior over concise, executable programs. We evaluate RIR on a suite of continuous manipulation tasks designed to test one-shot and few-shot generalization across variations in object pose, count, geometry, and layout. With as little as one demonstration, RIR infers the intended task structure and generalizes to novel settings, outperforming state-of-the-art vision-language model baselines.
Streaming Flow Policy: Simplifying diffusion$/$flow-matching policies by treating action trajectories as flow trajectories
May 28, 2025Recent advances in diffusion$/$flow-matching policies have enabled imitation learning of complex, multi-modal action trajectories. However, they are computationally expensive because they sample a trajectory of trajectories: a diffusion$/$flow trajectory of action trajectories. They discard intermediate action trajectories, and must wait for the sampling process to complete before any actions can be executed on the robot. We simplify diffusion$/$flow policies by treating action trajectories as flow trajectories. Instead of starting from pure noise, our algorithm samples from a narrow Gaussian around the last action. Then, it incrementally integrates a velocity field learned via flow matching to produce a sequence of actions that constitute a single trajectory. This enables actions to be streamed to the robot on-the-fly during the flow sampling process, and is well-suited for receding horizon policy execution. Despite streaming, our method retains the ability to model multi-modal behavior. We train flows that stabilize around demonstration trajectories to reduce distribution shift and improve imitation learning performance. Streaming flow policy outperforms prior methods while enabling faster policy execution and tighter sensorimotor loops for learning-based robot control. Project website: https://streaming-flow-policy.github.io/
LLM-Guided Probabilistic Program Induction for POMDP Model Estimation
May 04, 2025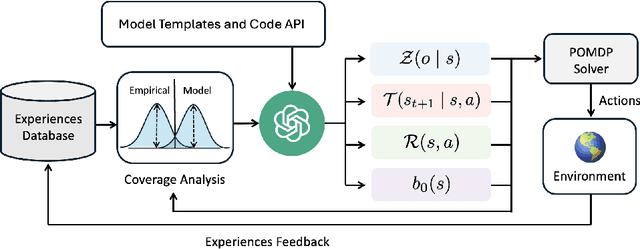



Partially Observable Markov Decision Processes (POMDPs) model decision making under uncertainty. While there are many approaches to approximately solving POMDPs, we aim to address the problem of learning such models. In particular, we are interested in a subclass of POMDPs wherein the components of the model, including the observation function, reward function, transition function, and initial state distribution function, can be modeled as low-complexity probabilistic graphical models in the form of a short probabilistic program. Our strategy to learn these programs uses an LLM as a prior, generating candidate probabilistic programs that are then tested against the empirical distribution and adjusted through feedback. We experiment on a number of classical toy POMDP problems, simulated MiniGrid domains, and two real mobile-base robotics search domains involving partial observability. Our results show that using an LLM to guide in the construction of a low-complexity POMDP model can be more effective than tabular POMDP learning, behavior cloning, or direct LLM planning.
Seeing is Believing: Belief-Space Planning with Foundation Models as Uncertainty Estimators
Apr 04, 2025Generalizable robotic mobile manipulation in open-world environments poses significant challenges due to long horizons, complex goals, and partial observability. A promising approach to address these challenges involves planning with a library of parameterized skills, where a task planner sequences these skills to achieve goals specified in structured languages, such as logical expressions over symbolic facts. While vision-language models (VLMs) can be used to ground these expressions, they often assume full observability, leading to suboptimal behavior when the agent lacks sufficient information to evaluate facts with certainty. This paper introduces a novel framework that leverages VLMs as a perception module to estimate uncertainty and facilitate symbolic grounding. Our approach constructs a symbolic belief representation and uses a belief-space planner to generate uncertainty-aware plans that incorporate strategic information gathering. This enables the agent to effectively reason about partial observability and property uncertainty. We demonstrate our system on a range of challenging real-world tasks that require reasoning in partially observable environments. Simulated evaluations show that our approach outperforms both vanilla VLM-based end-to-end planning or VLM-based state estimation baselines by planning for and executing strategic information gathering. This work highlights the potential of VLMs to construct belief-space symbolic scene representations, enabling downstream tasks such as uncertainty-aware planning.
Flow-based Domain Randomization for Learning and Sequencing Robotic Skills
Feb 03, 2025



Domain randomization in reinforcement learning is an established technique for increasing the robustness of control policies trained in simulation. By randomizing environment properties during training, the learned policy can become robust to uncertainties along the randomized dimensions. While the environment distribution is typically specified by hand, in this paper we investigate automatically discovering a sampling distribution via entropy-regularized reward maximization of a normalizing-flow-based neural sampling distribution. We show that this architecture is more flexible and provides greater robustness than existing approaches that learn simpler, parameterized sampling distributions, as demonstrated in six simulated and one real-world robotics domain. Lastly, we explore how these learned sampling distributions, combined with a privileged value function, can be used for out-of-distribution detection in an uncertainty-aware multi-step manipulation planner.
Predicate Invention from Pixels via Pretrained Vision-Language Models
Dec 31, 2024



Our aim is to learn to solve long-horizon decision-making problems in highly-variable, combinatorially-complex robotics domains given raw sensor input in the form of images. Previous work has shown that one way to achieve this aim is to learn a structured abstract transition model in the form of symbolic predicates and operators, and then plan within this model to solve novel tasks at test time. However, these learned models do not ground directly into pixels from just a handful of demonstrations. In this work, we propose to invent predicates that operate directly over input images by leveraging the capabilities of pretrained vision-language models (VLMs). Our key idea is that, given a set of demonstrations, a VLM can be used to propose a set of predicates that are potentially relevant for decision-making and then to determine the truth values of these predicates in both the given demonstrations and new image inputs. We build upon an existing framework for predicate invention, which generates feature-based predicates operating on object-centric states, to also generate visual predicates that operate on images. Experimentally, we show that our approach -- pix2pred -- is able to invent semantically meaningful predicates that enable generalization to novel, complex, and long-horizon tasks across two simulated robotic environments.
Functional Risk Minimization
Dec 30, 2024The field of Machine Learning has changed significantly since the 1970s. However, its most basic principle, Empirical Risk Minimization (ERM), remains unchanged. We propose Functional Risk Minimization~(FRM), a general framework where losses compare functions rather than outputs. This results in better performance in supervised, unsupervised, and RL experiments. In the FRM paradigm, for each data point $(x_i,y_i)$ there is function $f_{\theta_i}$ that fits it: $y_i = f_{\theta_i}(x_i)$. This allows FRM to subsume ERM for many common loss functions and to capture more realistic noise processes. We also show that FRM provides an avenue towards understanding generalization in the modern over-parameterized regime, as its objective can be framed as finding the simplest model that fits the training data.
One-Shot Manipulation Strategy Learning by Making Contact Analogies
Nov 14, 2024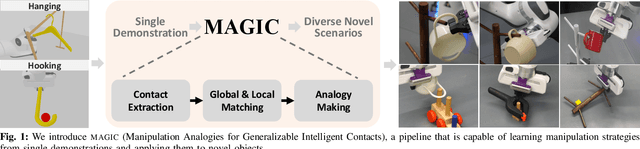

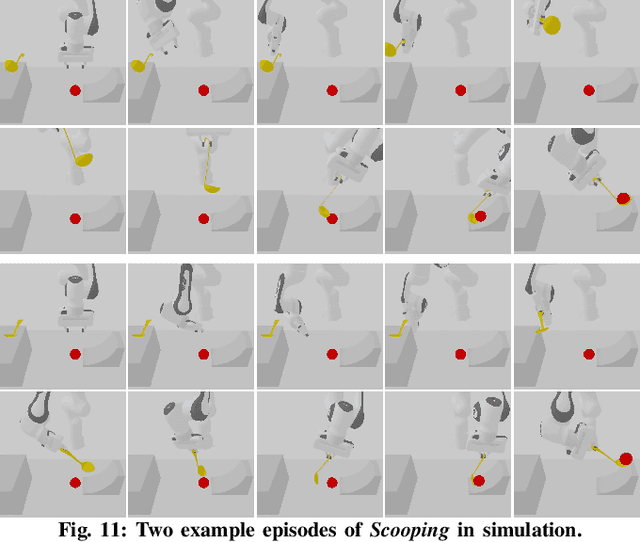
We present a novel approach, MAGIC (manipulation analogies for generalizable intelligent contacts), for one-shot learning of manipulation strategies with fast and extensive generalization to novel objects. By leveraging a reference action trajectory, MAGIC effectively identifies similar contact points and sequences of actions on novel objects to replicate a demonstrated strategy, such as using different hooks to retrieve distant objects of different shapes and sizes. Our method is based on a two-stage contact-point matching process that combines global shape matching using pretrained neural features with local curvature analysis to ensure precise and physically plausible contact points. We experiment with three tasks including scooping, hanging, and hooking objects. MAGIC demonstrates superior performance over existing methods, achieving significant improvements in runtime speed and generalization to different object categories. Website: https://magic-2024.github.io/ .