 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicate Invention from Pixels via Pretrained Vision-Language Models
Dec 31, 2024



Our aim is to learn to solve long-horizon decision-making problems in highly-variable, combinatorially-complex robotics domains given raw sensor input in the form of images. Previous work has shown that one way to achieve this aim is to learn a structured abstract transition model in the form of symbolic predicates and operators, and then plan within this model to solve novel tasks at test time. However, these learned models do not ground directly into pixels from just a handful of demonstrations. In this work, we propose to invent predicates that operate directly over input images by leveraging the capabilities of pretrained vision-language models (VLMs). Our key idea is that, given a set of demonstrations, a VLM can be used to propose a set of predicates that are potentially relevant for decision-making and then to determine the truth values of these predicates in both the given demonstrations and new image inputs. We build upon an existing framework for predicate invention, which generates feature-based predicates operating on object-centric states, to also generate visual predicates that operate on images. Experimentally, we show that our approach -- pix2pred -- is able to invent semantically meaningful predicates that enable generalization to novel, complex, and long-horizon tasks across two simulated robotic environments.
Learning Neuro-Symbolic Skills for Bilevel Planning
Jun 21, 2022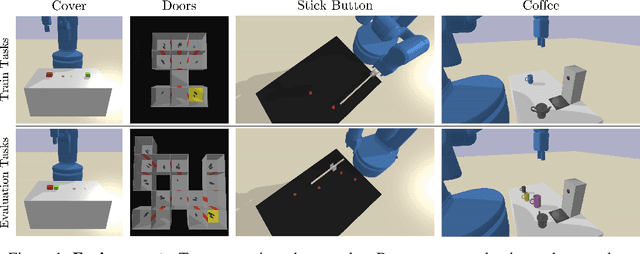

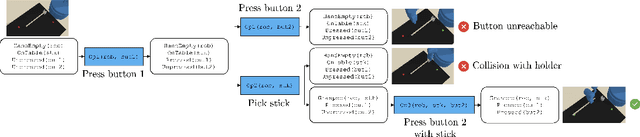
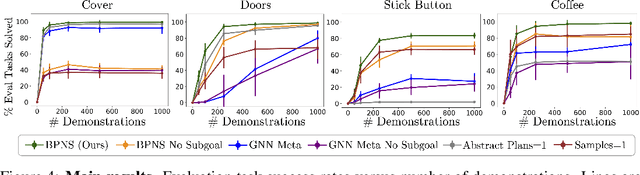
Decision-making is challenging in robotics environments with continuous object-centric states, continuous actions, long horizons, and sparse feedback. Hierarchical approaches, such as task and motion planning (TAMP), address these challenges by decomposing decision-making into two or more levels of abstraction. In a setting where demonstrations and symbolic predicates are given, prior work has shown how to learn symbolic operators and neural samplers for TAMP with manually designed parameterized policies. Our main contribution is a method for learning parameterized polices in combination with operators and samplers. These components are packaged into modular neuro-symbolic skills and sequenced together with search-then-sample TAMP to solve new tasks. In experiments in four robotics domains, we show that our approach -- bilevel planning with neuro-symbolic skills -- can solve a wide range of tasks with varying initial states, goals, and objects, outperforming six baselines and ablations. Video: https://youtu.be/PbFZP8rPuGg Code: https://tinyurl.com/skill-learning