 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreaming Flow Policy: Simplifying diffusion$/$flow-matching policies by treating action trajectories as flow trajectories
May 28, 2025Recent advances in diffusion$/$flow-matching policies have enabled imitation learning of complex, multi-modal action trajectories. However, they are computationally expensive because they sample a trajectory of trajectories: a diffusion$/$flow trajectory of action trajectories. They discard intermediate action trajectories, and must wait for the sampling process to complete before any actions can be executed on the robot. We simplify diffusion$/$flow policies by treating action trajectories as flow trajectories. Instead of starting from pure noise, our algorithm samples from a narrow Gaussian around the last action. Then, it incrementally integrates a velocity field learned via flow matching to produce a sequence of actions that constitute a single trajectory. This enables actions to be streamed to the robot on-the-fly during the flow sampling process, and is well-suited for receding horizon policy execution. Despite streaming, our method retains the ability to model multi-modal behavior. We train flows that stabilize around demonstration trajectories to reduce distribution shift and improve imitation learning performance. Streaming flow policy outperforms prior methods while enabling faster policy execution and tighter sensorimotor loops for learning-based robot control. Project website: https://streaming-flow-policy.github.io/
Anomalies by Synthesis: Anomaly Detection using Generative Diffusion Models for Off-Road Navigation
May 28, 2025In order to navigate safely and reliably in off-road and unstructured environments, robots must detect anomalies that are out-of-distribution (OOD) with respect to the training data. We present an analysis-by-synthesis approach for pixel-wise anomaly detection without making any assumptions about the nature of OOD data. Given an input image, we use a generative diffusion model to synthesize an edited image that removes anomalies while keeping the remaining image unchanged. Then, we formulate anomaly detection as analyzing which image segments were modified by the diffusion model. We propose a novel inference approach for guided diffusion by analyzing the ideal guidance gradient and deriving a principled approximation that bootstraps the diffusion model to predict guidance gradients. Our editing technique is purely test-time that can be integrated into existing workflows without the need for retraining or fine-tuning. Finally, we use a combination of vision-language foundation models to compare pixels in a learned feature space and detect semantically meaningful edits, enabling accurate anomaly detection for off-road navigation. Project website: https://siddancha.github.io/anomalies-by-diffusion-synthesis/
Robot Safety Monitoring using Programmable Light Curtains
Apr 04, 2024As factories continue to evolve into collaborative spaces with multiple robots working together with human supervisors in the loop, ensuring safety for all actors involved becomes critical. Currently, laser-based light curtain sensors are widely used in factories for safety monitoring. While these conventional safety sensors meet high accuracy standards, they are difficult to reconfigure and can only monitor a fixed user-defined region of space. Furthermore, they are typically expensive. Instead, we leverage a controllable depth sensor, programmable light curtains (PLC), to develop an inexpensive and flexible real-time safety monitoring system for collaborative robot workspaces. Our system projects virtual dynamic safety envelopes that tightly envelop the moving robot at all times and detect any objects that intrude the envelope. Furthermore, we develop an instrumentation algorithm that optimally places (multiple) PLCs in a workspace to maximize the visibility coverage of robots. Our work enables fence-less human-robot collaboration, while scaling to monitor multiple robots with few sensors. We analyze our system in a real manufacturing testbed with four robot arms and demonstrate its capabilities as a fast, accurate, and inexpensive safety monitoring solution.
EVORA: Deep Evidential Traversability Learning for Risk-Aware Off-Road Autonomy
Nov 10, 2023

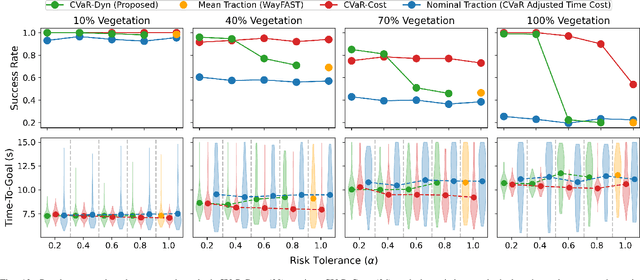

Traversing terrain with good traction is crucial for achieving fast off-road navigation. Instead of manually designing costs based on terrain features, existing methods learn terrain properties directly from data via self-supervision, but challenges remain to properly quantify and mitigate risks due to uncertainties in learned models. This work efficiently quantifies both aleatoric and epistemic uncertainties by learning discrete traction distributions and probability densities of the traction predictor's latent features. Leveraging evidential deep learning, we parameterize Dirichlet distributions with the network outputs and propose a novel uncertainty-aware squared Earth Mover's distance loss with a closed-form expression that improves learning accuracy and navigation performance. The proposed risk-aware planner simulates state trajectories with the worst-case expected traction to handle aleatoric uncertainty, and penalizes trajectories moving through terrain with high epistemic uncertainty. Our approach is extensively validated in simulation and on wheeled and quadruped robots, showing improved navigation performance compared to methods that assume no slip, assume the expected traction, or optimize for the worst-case expected cost.
Active Velocity Estimation using Light Curtains via Self-Supervised Multi-Armed Bandits
Feb 28, 2023To navigate in an environment safely and autonomously, robots must accurately estimate where obstacles are and how they move. Instead of using expensive traditional 3D sensors, we explore the use of a much cheaper, faster, and higher resolution alternative: programmable light curtains. Light curtains are a controllable depth sensor that sense only along a surface that the user selects. We adapt a probabilistic method based on particle filters and occupancy grids to explicitly estimate the position and velocity of 3D points in the scene using partial measurements made by light curtains. The central challenge is to decide where to place the light curtain to accurately perform this task. We propose multiple curtain placement strategies guided by maximizing information gain and verifying predicted object locations. Then, we combine these strategies using an online learning framework. We propose a novel self-supervised reward function that evaluates the accuracy of current velocity estimates using future light curtain placements. We use a multi-armed bandit framework to intelligently switch between placement policies in real time, outperforming fixed policies. We develop a full-stack navigation system that uses position and velocity estimates from light curtains for downstream tasks such as localization, mapping, path-planning, and obstacle avoidance. This work paves the way for controllable light curtains to accurately, efficiently, and purposefully perceive and navigate complex and dynamic environments. Project website: https://siddancha.github.io/projects/active-velocity-estimation/
Active Safety Envelopes using Light Curtains with Probabilistic Guarantees
Jul 08, 2021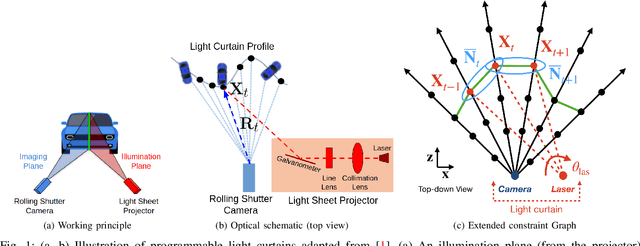
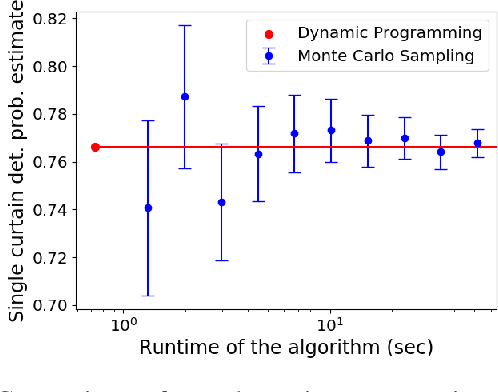
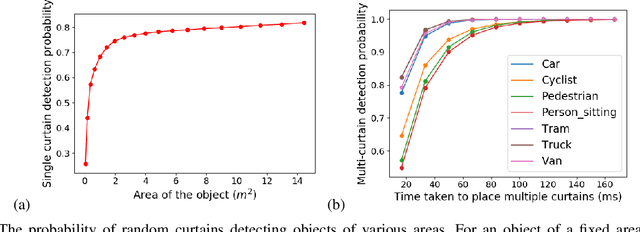
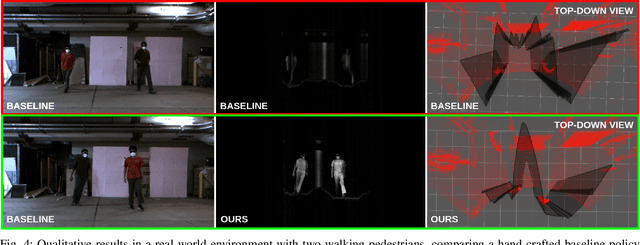
To safely navigate unknown environments, robots must accurately perceive dynamic obstacles. Instead of directly measuring the scene depth with a LiDAR sensor, we explore the use of a much cheaper and higher resolution sensor: programmable light curtains. Light curtains are controllable depth sensors that sense only along a surface that a user selects. We use light curtains to estimate the safety envelope of a scene: a hypothetical surface that separates the robot from all obstacles. We show that generating light curtains that sense random locations (from a particular distribution) can quickly discover the safety envelope for scenes with unknown objects. Importantly, we produce theoretical safety guarantees on the probability of detecting an obstacle using random curtains. We combine random curtains with a machine learning based model that forecasts and tracks the motion of the safety envelope efficiently. Our method accurately estimates safety envelopes while providing probabilistic safety guarantees that can be used to certify the efficacy of a robot perception system to detect and avoid dynamic obstacles. We evaluate our approach in a simulated urban driving environment and a real-world environment with moving pedestrians using a light curtain device and show that we can estimate safety envelopes efficiently and effectively. Project website: https://siddancha.github.io/projects/active-safety-envelopes-with-guarantees
Robust Instance Tracking via Uncertainty Flow
Oct 09, 2020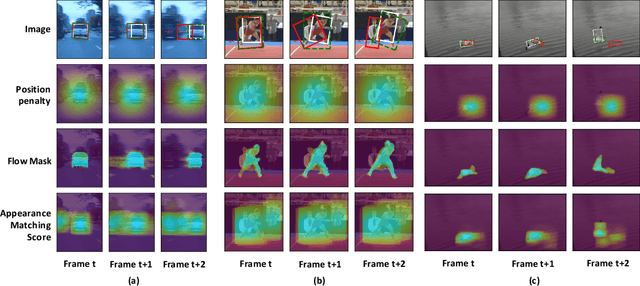
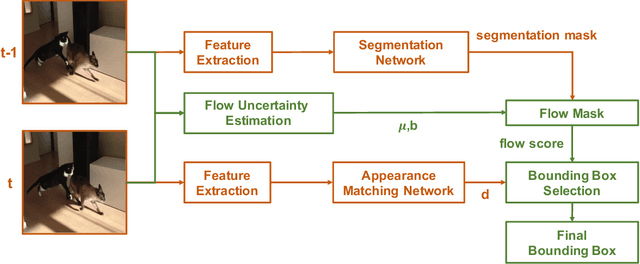
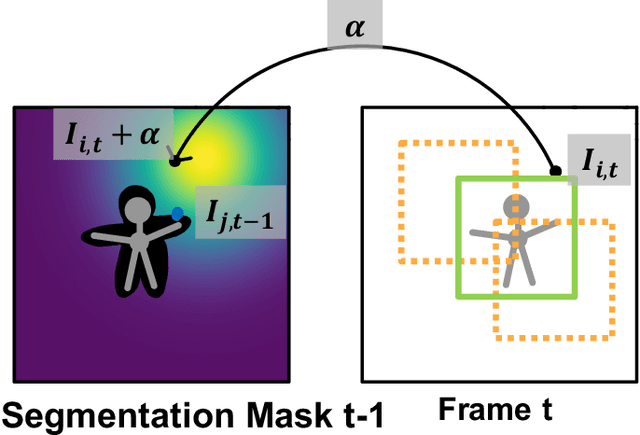
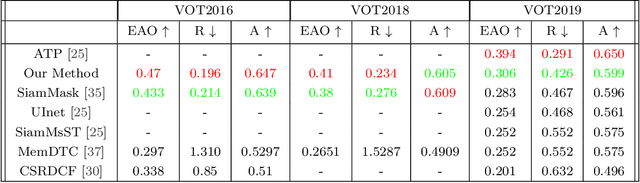
Current state-of-the-art trackers often fail due to distractorsand large object appearance changes. In this work, we explore the use ofdense optical flow to improve tracking robustness. Our main insight is that, because flow estimation can also have errors, we need to incorporate an estimate of flow uncertainty for robust tracking. We present a novel tracking framework which combines appearance and flow uncertainty information to track objects in challenging scenarios. We experimentally verify that our framework improves tracking robustness, leading to new state-of-the-art results. Further, our experimental ablations shows the importance of flow uncertainty for robust tracking.
Uncertainty-aware Self-supervised 3D Data Association
Aug 18, 2020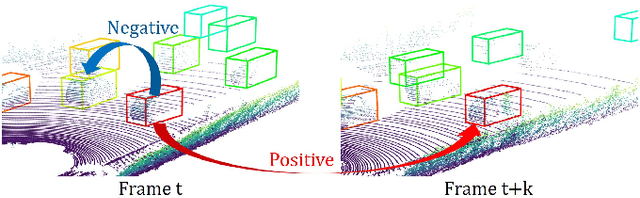



3D object trackers usually require training on large amounts of annotated data that is expensive and time-consuming to collect. Instead, we propose leveraging vast unlabeled datasets by self-supervised metric learning of 3D object trackers, with a focus on data association. Large scale annotations for unlabeled data are cheaply obtained by automatic object detection and association across frames. We show how these self-supervised annotations can be used in a principled manner to learn point-cloud embeddings that are effective for 3D tracking. We estimate and incorporate uncertainty in self-supervised tracking to learn more robust embeddings, without needing any labeled data. We design embeddings to differentiate objects across frames, and learn them using uncertainty-aware self-supervised training. Finally, we demonstrate their ability to perform accurate data association across frames, towards effective and accurate 3D tracking. Project videos and code are at https://jianrenw.github.io/Self-Supervised-3D-Data-Association.
Active Perception using Light Curtains for Autonomous Driving
Aug 05, 2020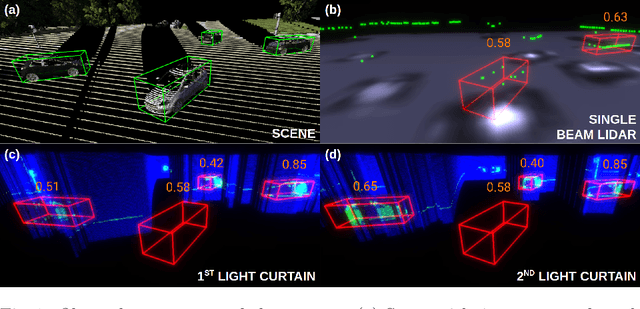
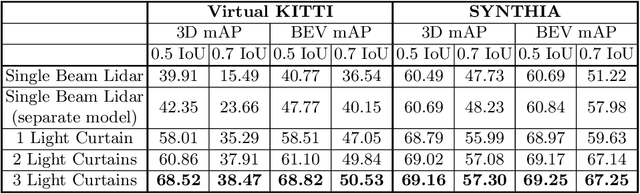
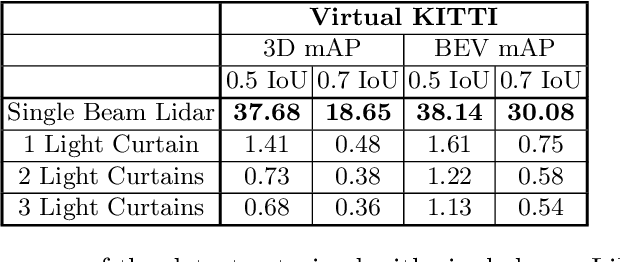
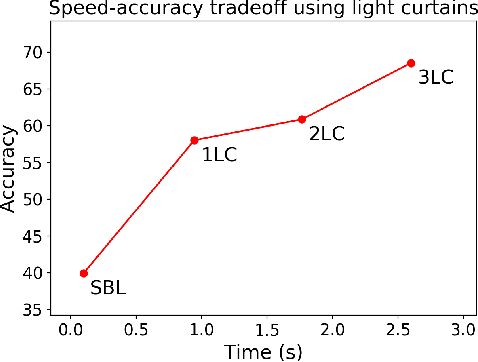
Most real-world 3D sensors such as LiDARs perform fixed scans of the entire environment, while being decoupled from the recognition system that processes the sensor data. In this work, we propose a method for 3D object recognition using light curtains, a resource-efficient controllable sensor that measures depth at user-specified locations in the environment. Crucially, we propose using prediction uncertainty of a deep learning based 3D point cloud detector to guide active perception. Given a neural network's uncertainty, we derive an optimization objective to place light curtains using the principle of maximizing information gain. Then, we develop a novel and efficient optimization algorithm to maximize this objective by encoding the physical constraints of the device into a constraint graph and optimizing with dynamic programming. We show how a 3D detector can be trained to detect objects in a scene by sequentially placing uncertainty-guided light curtains to successively improve detection accuracy. Code and details can be found on the project webpage: http://siddancha.github.io/projects/active-perception-light-curtains.
Combining Deep Learning and Verification for Precise Object Instance Detection
Dec 27, 2019
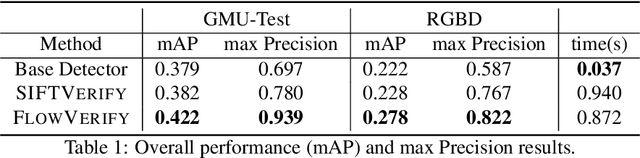


Deep learning object detectors often return false positives with very high confidence. Although they optimize generic detection performance, such as mean average precision (mAP), they are not designed for reliability. For a reliable detection system, if a high confidence detection is made, we would want high certainty that the object has indeed been detected. To achieve this, we have developed a set of verification tests which a proposed detection must pass to be accepted. We develop a theoretical framework which proves that, under certain assumptions, our verification tests will not accept any false positives. Based on an approximation to this framework, we present a practical detection system that can verify, with high precision, whether each detection of a machine-learning based object detector is correct. We show that these tests can improve the overall accuracy of a base detector and that accepted examples are highly likely to be correct. This allows the detector to operate in a high precision regime and can thus be used for robotic perception systems as a reliable instance detection method.
* 9 pages main paper, 2 pages references, 10 pages supplementary material