 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Deep Learning and Verification for Precise Object Instance Detection
Paper and Code

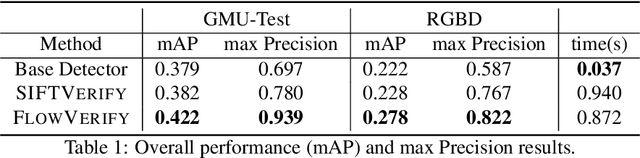


Deep learning object detectors often return false positives with very high confidence. Although they optimize generic detection performance, such as mean average precision (mAP), they are not designed for reliability. For a reliable detection system, if a high confidence detection is made, we would want high certainty that the object has indeed been detected. To achieve this, we have developed a set of verification tests which a proposed detection must pass to be accepted. We develop a theoretical framework which proves that, under certain assumptions, our verification tests will not accept any false positives. Based on an approximation to this framework, we present a practical detection system that can verify, with high precision, whether each detection of a machine-learning based object detector is correct. We show that these tests can improve the overall accuracy of a base detector and that accepted examples are highly likely to be correct. This allows the detector to operate in a high precision regime and can thus be used for robotic perception systems as a reliable instance detection method.