 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Path Planning Through Large Collections of Safe Boxes
Paper and Code
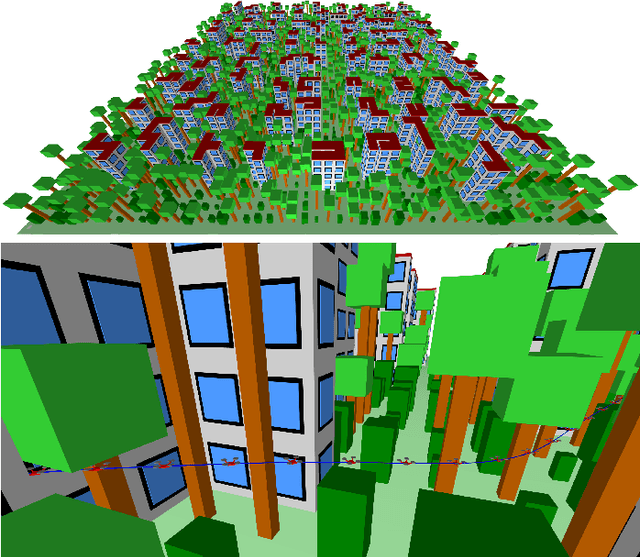
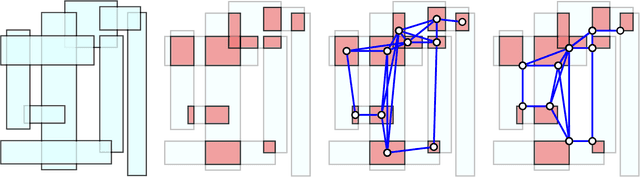
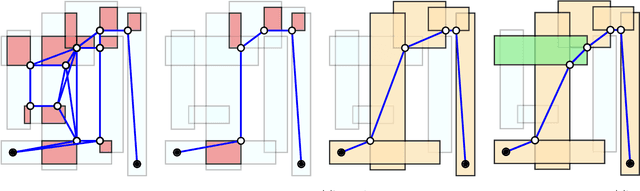
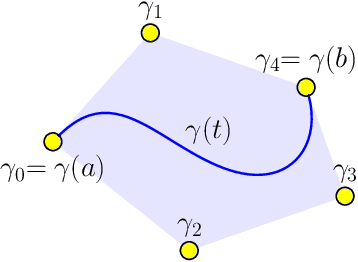
We present a fast algorithm for the design of smooth paths (or trajectories) that are constrained to lie in a collection of axis-aligned boxes. We consider the case where the number of these safe boxes is large, and basic preprocessing of them (such as finding their intersections) can be done offline. At runtime we quickly generate a smooth path between given initial and terminal positions. Our algorithm designs trajectories that are guaranteed to be safe at all times, and it detects infeasibility whenever such a trajectory does not exist. Our algorithm is based on two subproblems that we can solve very efficiently: finding a shortest path in a weighted graph, and solving (multiple) convex optimal control problems. We demonstrate the proposed path planner on large-scale numerical examples, and we provide an efficient open-source software implementation, fastpathplanning.