 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Based Control with Sparse Neural Dynamics
Dec 20, 2023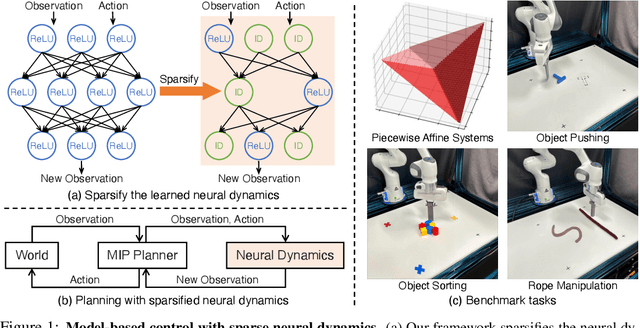
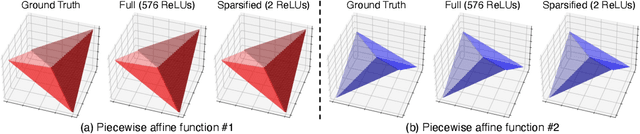
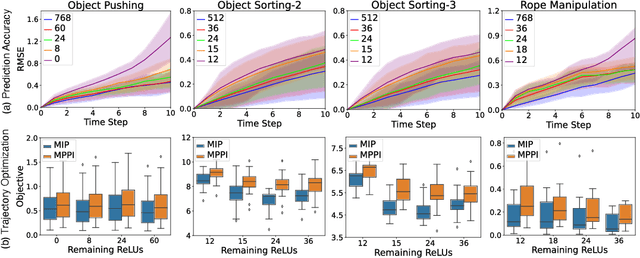
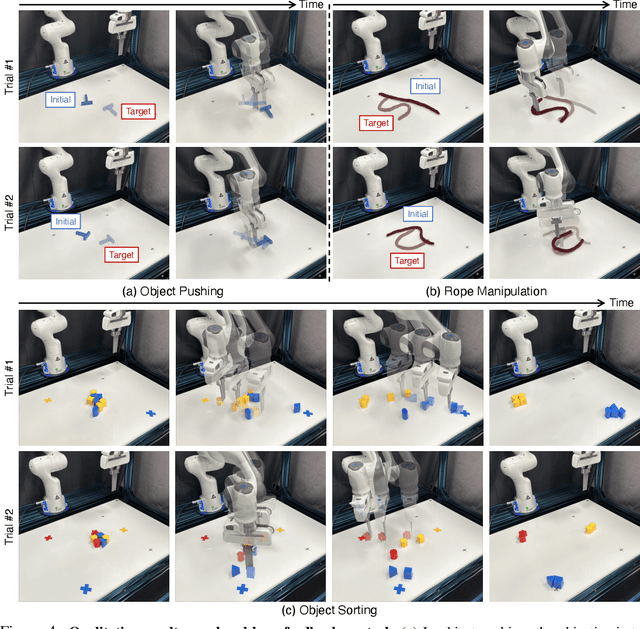
Learning predictive models from observations using deep neural networks (DNNs) is a promising new approach to many real-world planning and control problems. However, common DNNs are too unstructured for effective planning, and current control methods typically rely on extensive sampling or local gradient descent. In this paper, we propose a new framework for integrated model learning and predictive control that is amenable to efficient optimization algorithms. Specifically, we start with a ReLU neural model of the system dynamics and, with minimal losses in prediction accuracy, we gradually sparsify it by removing redundant neurons. This discrete sparsification process is approximated as a continuous problem, enabling an end-to-end optimization of both the model architecture and the weight parameters. The sparsified model is subsequently used by a mixed-integer predictive controller, which represents the neuron activations as binary variables and employs efficient branch-and-bound algorithms. Our framework is applicable to a wide variety of DNNs, from simple multilayer perceptrons to complex graph neural dynamics. It can efficiently handle tasks involving complicated contact dynamics, such as object pushing, compositional object sorting, and manipulation of deformable objects. Numerical and hardware experiments show that, despite the aggressive sparsification, our framework can deliver better closed-loop performance than existing state-of-the-art methods.
Extracting Molecular Properties from Natural Language with Multimodal Contrastive Learning
Jul 22, 2023

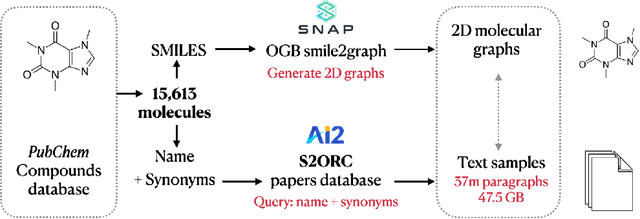

Deep learning in computational biochemistry has traditionally focused on molecular graphs neural representations; however, recent advances in language models highlight how much scientific knowledge is encoded in text. To bridge these two modalities, we investigate how molecular property information can be transferred from natural language to graph representations. We study property prediction performance gains after using contrastive learning to align neural graph representations with representations of textual descriptions of their characteristics. We implement neural relevance scoring strategies to improve text retrieval, introduce a novel chemically-valid molecular graph augmentation strategy inspired by organic reactions, and demonstrate improved performance on downstream MoleculeNet property classification tasks. We achieve a +4.26% AUROC gain versus models pre-trained on the graph modality alone, and a +1.54% gain compared to recently proposed molecular graph/text contrastively trained MoMu model (Su et al. 2022).
Contingencies from Observations: Tractable Contingency Planning with Learned Behavior Models
Apr 21, 2021



Humans have a remarkable ability to make decisions by accurately reasoning about future events, including the future behaviors and states of mind of other agents. Consider driving a car through a busy intersection: it is necessary to reason about the physics of the vehicle, the intentions of other drivers, and their beliefs about your own intentions. If you signal a turn, another driver might yield to you, or if you enter the passing lane, another driver might decelerate to give you room to merge in front. Competent drivers must plan how they can safely react to a variety of potential future behaviors of other agents before they make their next move. This requires contingency planning: explicitly planning a set of conditional actions that depend on the stochastic outcome of future events. In this work, we develop a general-purpose contingency planner that is learned end-to-end using high-dimensional scene observations and low-dimensional behavioral observations. We use a conditional autoregressive flow model to create a compact contingency planning space, and show how this model can tractably learn contingencies from behavioral observations. We developed a closed-loop control benchmark of realistic multi-agent scenarios in a driving simulator (CARLA), on which we compare our method to various noncontingent methods that reason about multi-agent future behavior, including several state-of-the-art deep learning-based planning approaches. We illustrate that these noncontingent planning methods fundamentally fail on this benchmark, and find that our deep contingency planning method achieves significantly superior performance. Code to run our benchmark and reproduce our results is available at https://sites.google.com/view/contingency-planning