 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePowerline Tracking with Event Cameras
Aug 01, 2021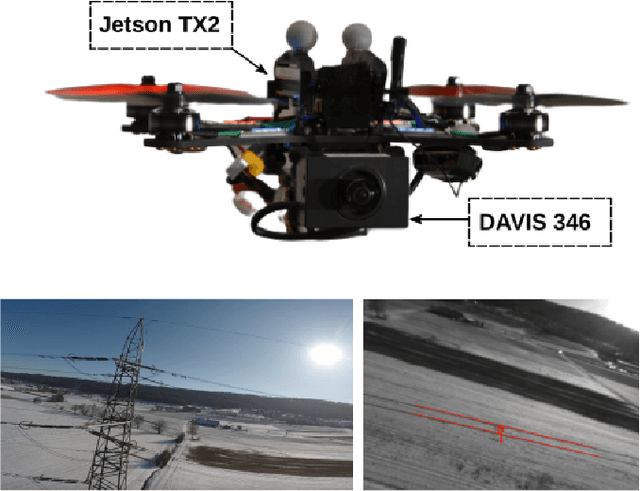



Autonomous inspection of powerlines with quadrotors is challenging. Flights require persistent perception to keep a close look at the lines. We propose a method that uses event cameras to robustly track powerlines. Event cameras are inherently robust to motion blur, have low latency, and high dynamic range. Such properties are advantageous for autonomous inspection of powerlines with drones, where fast motions and challenging illumination conditions are ordinary. Our method identifies lines in the stream of events by detecting planes in the spatio-temporal signal, and tracks them through time. The implementation runs onboard and is capable of detecting multiple distinct lines in real time with rates of up to $320$ thousand events per second. The performance is evaluated in real-world flights along a powerline. The tracker is able to persistently track the powerlines, with a mean lifetime of the line $10\times$ longer than existing approaches.
Traversing Steep and Granular Martian Analog Slopes With a Dynamic Quadrupedal Robot
Jun 03, 2021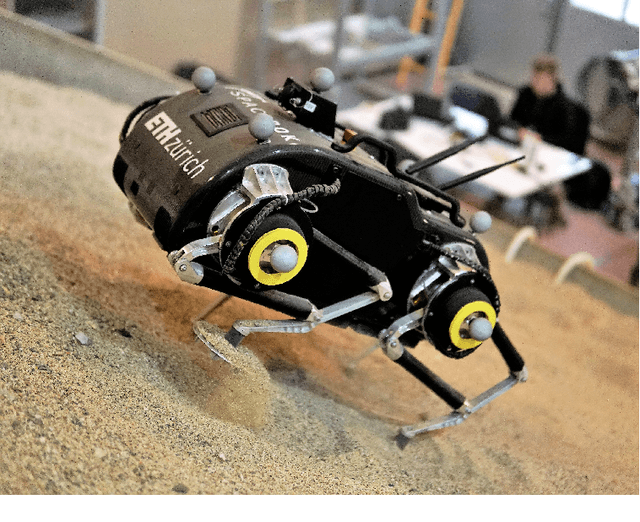
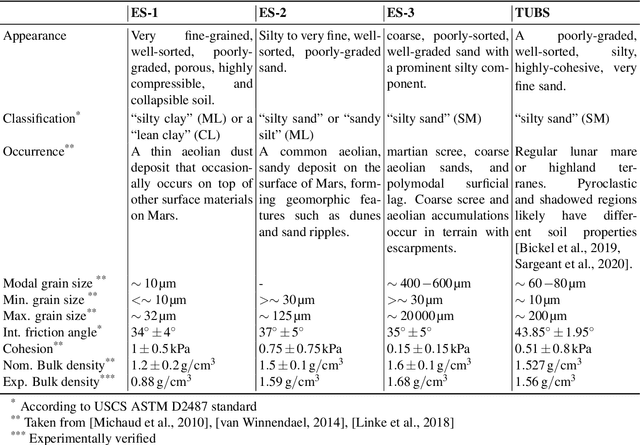
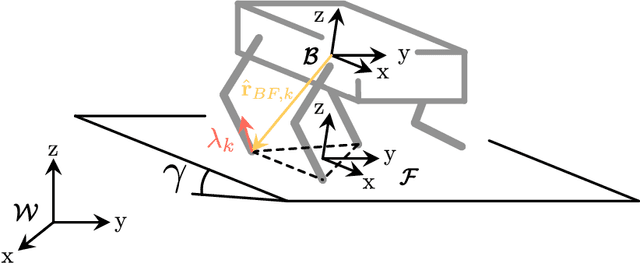
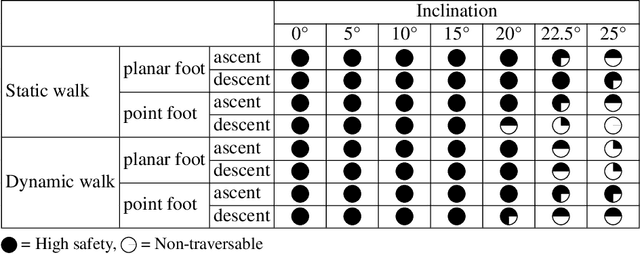
Celestial bodies such as the Moon and Mars are mainly covered by loose, granular soil, a notoriously challenging terrain to traverse with (wheeled) robotic systems. Here, we present experimental work on traversing steep, granular slopes with the dynamically walking quadrupedal robot SpaceBok. To adapt to the challenging environment, we developed passive-adaptive planar feet and optimized grouser pads to reduce sinkage and increase traction on planar and inclined granular soil. Single-foot experiments revealed that a large surface area of 110cm2 per foot reduces sinkage to an acceptable level even on highly collapsible soil (ES-1). Implementing several 12mm grouser blades increases traction by 22% to 66% on granular media compared to grouser-less designs. Together with a terrain-adapting walking controller, we validate - for the first time - static and dynamic locomotion on Mars analog slopes of up to 25{\deg}(the maximum of the testbed). We evaluated the performance between point- and planar feet and static and dynamic gaits regarding stability (safety), velocity, and energy consumption. We show that dynamic gaits are energetically more efficient than static gaits but are riskier on steep slopes. Our tests also revealed that planar feet's energy consumption drastically increases when the slope inclination approaches the soil's angle of internal friction due to shearing. Point feet are less affected by slippage due to their excessive sinkage, but in turn, are prone to instabilities and tripping. We present and discuss safe and energy-efficient global path-planning strategies for accessing steep topography on Mars based on our findings.