 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Object Aware LiDAR SLAM based on Automatic Generation of Training Data
Paper and Code
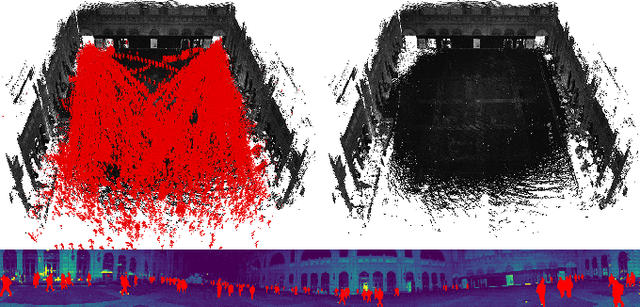
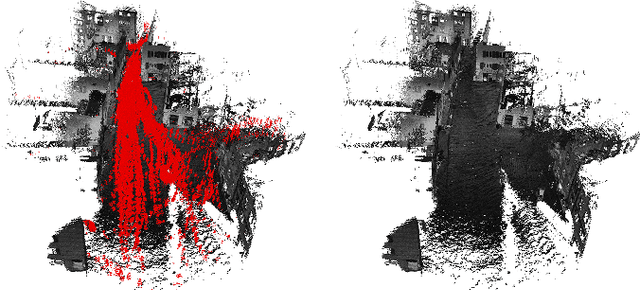
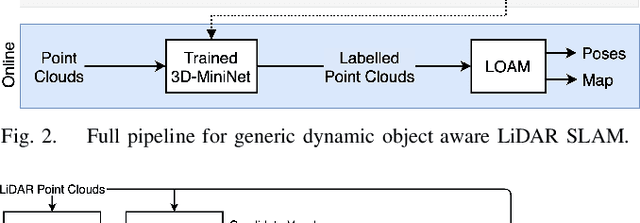
Highly dynamic environments, with moving objects such as cars or humans, can pose a performance challenge for LiDAR SLAM systems that assume largely static scenes. To overcome this challenge and support the deployment of robots in real world scenarios, we propose a complete solution for a dynamic object aware LiDAR SLAM algorithm. This is achieved by leveraging a real-time capable neural network that can detect dynamic objects, thus allowing our system to deal with them explicitly. To efficiently generate the necessary training data which is key to our approach, we present a novel end-to-end occupancy grid based pipeline that can automatically label a wide variety of arbitrary dynamic objects. Our solution can thus generalize to different environments without the need for expensive manual labeling and at the same time avoids assumptions about the presence of a predefined set of known objects in the scene. Using this technique, we automatically label over 12000 LiDAR scans collected in an urban environment with a large amount of pedestrians and use this data to train a neural network, achieving an average segmentation IoU of 0.82. We show that explicitly dealing with dynamic objects can improve the LiDAR SLAM odometry performance by 39.6% while yielding maps which better represent the environments. A supplementary video as well as our test data are available online.