 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeETHcavation: A Dataset and Pipeline for Panoptic Scene Understanding and Object Tracking in Dynamic Construction Environments
Oct 05, 2024



Construction sites are challenging environments for autonomous systems due to their unstructured nature and the presence of dynamic actors, such as workers and machinery. This work presents a comprehensive panoptic scene understanding solution designed to handle the complexities of such environments by integrating 2D panoptic segmentation with 3D LiDAR mapping. Our system generates detailed environmental representations in real-time by combining semantic and geometric data, supported by Kalman Filter-based tracking for dynamic object detection. We introduce a fine-tuning method that adapts large pre-trained panoptic segmentation models for construction site applications using a limited number of domain-specific samples. For this use case, we release a first-of-its-kind dataset of 502 hand-labeled sample images with panoptic annotations from construction sites. In addition, we propose a dynamic panoptic mapping technique that enhances scene understanding in unstructured environments. As a case study, we demonstrate the system's application for autonomous navigation, utilizing real-time RRT* for reactive path planning in dynamic scenarios. The dataset (https://leggedrobotics.github.io/panoptic-scene-understanding.github.io/) and code (https://github.com/leggedrobotics/rsl_panoptic_mapping) for training and deployment are publicly available to support future research.
A Field of Experts Prior for Adapting Neural Networks at Test Time
Feb 10, 2022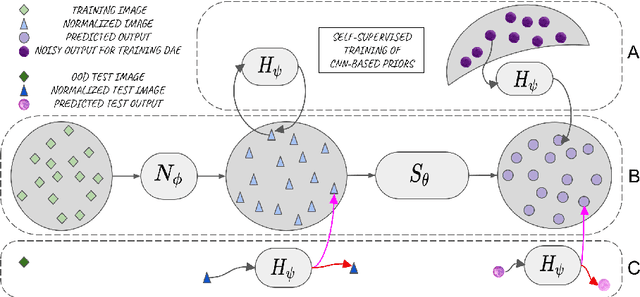
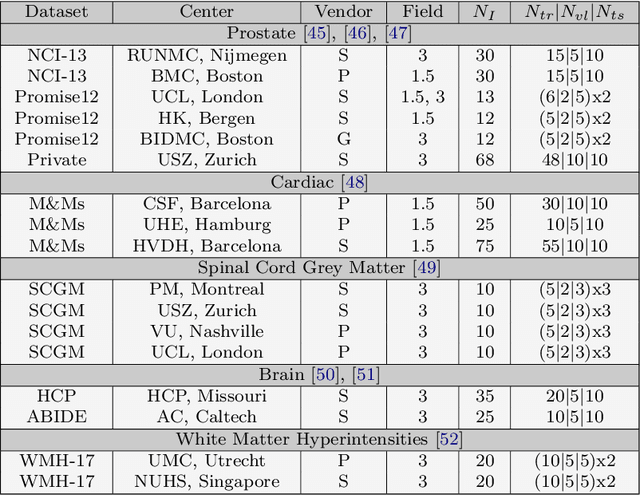
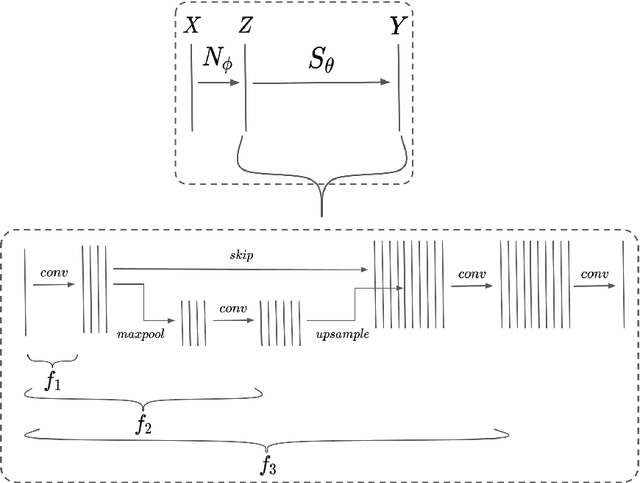
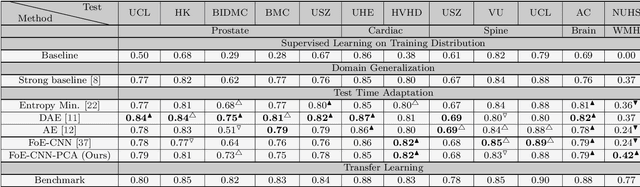
Performance of convolutional neural networks (CNNs) in image analysis tasks is often marred in the presence of acquisition-related distribution shifts between training and test images. Recently, it has been proposed to tackle this problem by fine-tuning trained CNNs for each test image. Such test-time-adaptation (TTA) is a promising and practical strategy for improving robustness to distribution shifts as it requires neither data sharing between institutions nor annotating additional data. Previous TTA methods use a helper model to increase similarity between outputs and/or features extracted from a test image with those of the training images. Such helpers, which are typically modeled using CNNs, can be task-specific and themselves vulnerable to distribution shifts in their inputs. To overcome these problems, we propose to carry out TTA by matching the feature distributions of test and training images, as modelled by a field-of-experts (FoE) prior. FoEs model complicated probability distributions as products of many simpler expert distributions. We use 1D marginal distributions of a trained task CNN's features as experts in the FoE model. Further, we compute principal components of patches of the task CNN's features, and consider the distributions of PCA loadings as additional experts. We validate the method on 5 MRI segmentation tasks (healthy tissues in 4 anatomical regions and lesions in 1 one anatomy), using data from 17 clinics, and on a MRI registration task, using data from 3 clinics. We find that the proposed FoE-based TTA is generically applicable in multiple tasks, and outperforms all previous TTA methods for lesion segmentation. For healthy tissue segmentation, the proposed method outperforms other task-agnostic methods, but a previous TTA method which is specifically designed for segmentation performs the best for most of the tested datasets. Our code is publicly available.