 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEVA: A high-mobility logistic vehicle with legged suspension
Mar 13, 2025The autonomous transportation of materials over challenging terrain is a challenge with major economic implications and remains unsolved. This paper introduces LEVA, a high-payload, high-mobility robot designed for autonomous logistics across varied terrains, including those typical in agriculture, construction, and search and rescue operations. LEVA uniquely integrates an advanced legged suspension system using parallel kinematics. It is capable of traversing stairs using a rl controller, has steerable wheels, and includes a specialized box pickup mechanism that enables autonomous payload loading as well as precise and reliable cargo transportation of up to 85 kg across uneven surfaces, steps and inclines while maintaining a cot of as low as 0.15. Through extensive experimental validation, LEVA demonstrates its off-road capabilities and reliability regarding payload loading and transport.
Affect-Driven Dialog Generation
Apr 04, 2019
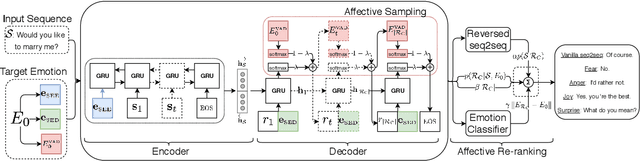
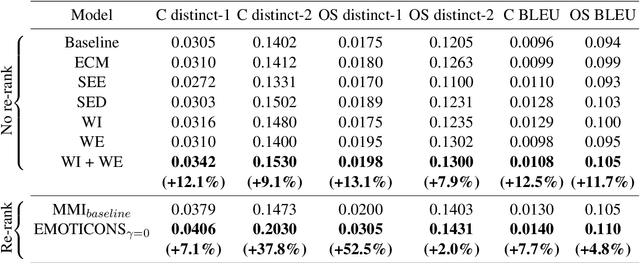
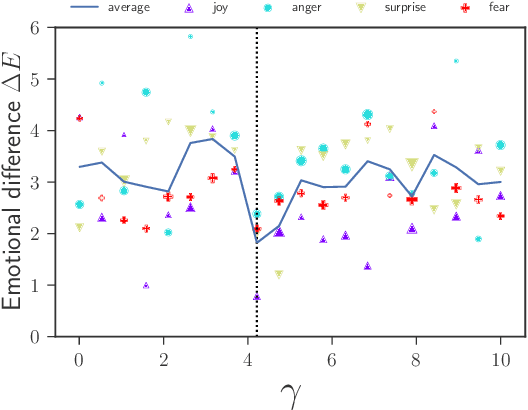
The majority of current systems for end-to-end dialog generation focus on response quality without an explicit control over the affective content of the responses. In this paper, we present an affect-driven dialog system, which generates emotional responses in a controlled manner using a continuous representation of emotions. The system achieves this by modeling emotions at a word and sequence level using: (1) a vector representation of the desired emotion, (2) an affect regularizer, which penalizes neutral words, and (3) an affect sampling method, which forces the neural network to generate diverse words that are emotionally relevant. During inference, we use a reranking procedure that aims to extract the most emotionally relevant responses using a human-in-the-loop optimization process. We study the performance of our system in terms of both quantitative (BLEU score and response diversity), and qualitative (emotional appropriateness) measures.