 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplementarity by Construction: A Lie-Group Approach to Solving Quadratic Programs with Linear Complementarity Constraints
Apr 13, 2026Many problems in robotics require reasoning over a mix of continuous dynamics and discrete events, such as making and breaking contact in manipulation and locomotion. These problems are locally well modeled by linear complementarity quadratic programs (LCQPs), an extension to QPs that introduce complementarity constraints. While very expressive, LCQPs are non-convex, and few solvers exist for computing good local solutions for use in planning pipelines. In this work, we observe that complementarity constraints form a Lie group under infinitesimal relaxation, and leverage this structure to perform on-manifold optimization. We introduce a retraction map that is numerically well behaved, and use it to parameterize the constraints so that they are satisfied by construction. The resulting solver avoids many of the classical issues with complementarity constraints. We provide an open-source solver, Marble, that is implemented in C++ with Julia and Python bindings. We demonstrate that Marble is competitive on a suite of benchmark problems, and solves a number of robotics problems where existing approaches fail to converge.
ReLU-QP: A GPU-Accelerated Quadratic Programming Solver for Model-Predictive Control
Nov 29, 2023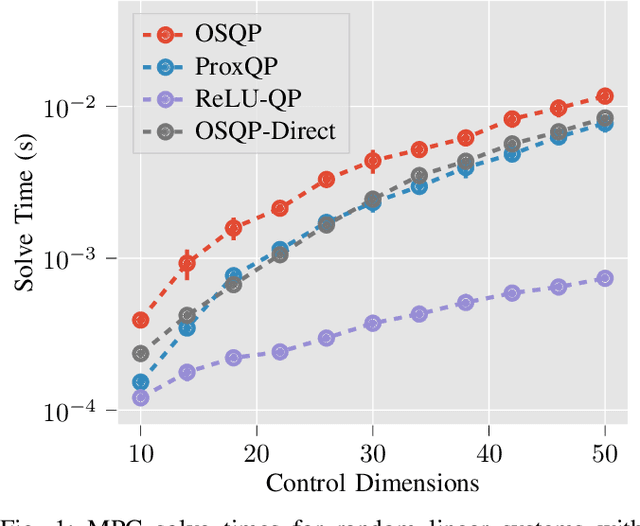
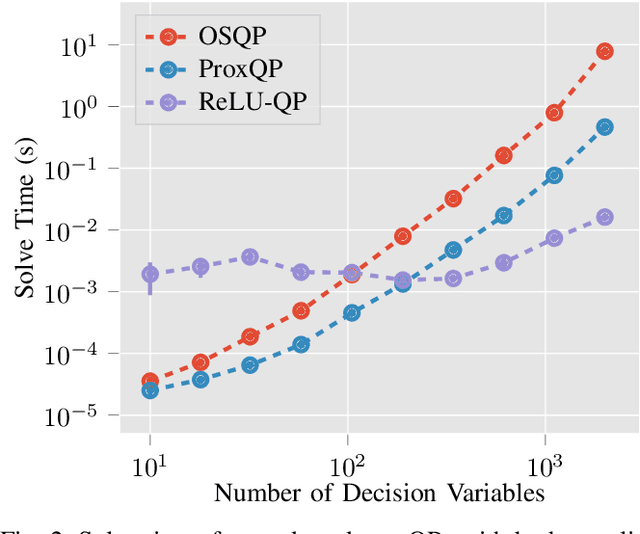
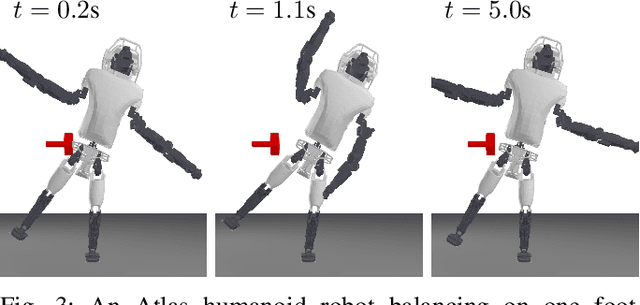
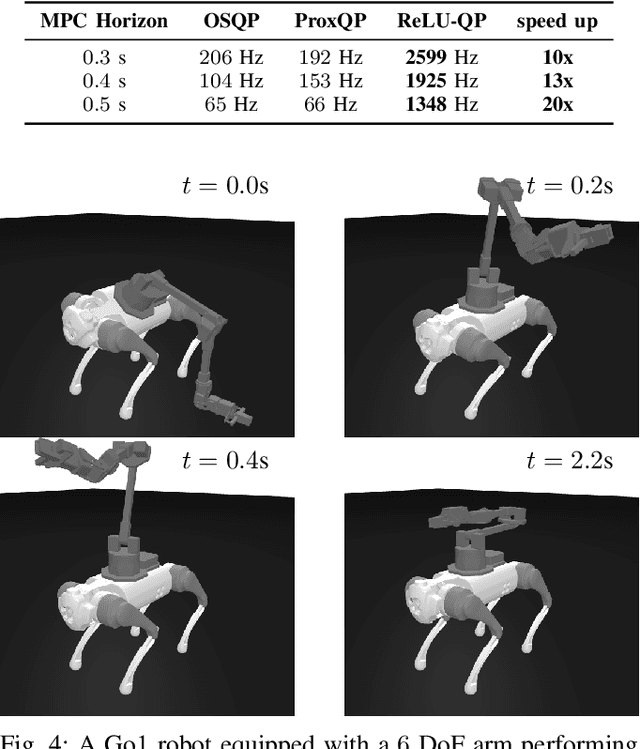
We present ReLU-QP, a GPU-accelerated solver for quadratic programs (QPs) that is capable of solving high-dimensional control problems at real-time rates. ReLU-QP is derived by exactly reformulating the Alternating Direction Method of Multipliers (ADMM) algorithm for solving QPs as a deep, weight-tied neural network with rectified linear unit (ReLU) activations. This reformulation enables the deployment of ReLU-QP on GPUs using standard machine-learning toolboxes. We evaluate the performance of ReLU-QP across three model-predictive control (MPC) benchmarks: stabilizing random linear dynamical systems with control limits, balancing an Atlas humanoid robot on a single foot, and tracking whole-body reference trajectories on a quadruped equipped with a six-degree-of-freedom arm. These benchmarks indicate that ReLU-QP is competitive with state-of-the-art CPU-based solvers for small-to-medium-scale problems and offers order-of-magnitude speed improvements for larger-scale problems.
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
Apr 27, 2023We present SLoMo: a first-of-its-kind framework for transferring skilled motions from casually captured "in the wild" video footage of humans and animals to legged robots. SLoMo works in three stages: 1) synthesize a physically plausible reconstructed key-point trajectory from monocular videos; 2) optimize a dynamically feasible reference trajectory for the robot offline that includes body and foot motion, as well as contact sequences that closely tracks the key points; 3) track the reference trajectory online using a general-purpose model-predictive controller on robot hardware. Traditional motion imitation for legged motor skills often requires expert animators, collaborative demonstrations, and/or expensive motion capture equipment, all of which limits scalability. Instead, SLoMo only relies on easy-to-obtain monocular video footage, readily available in online repositories such as YouTube. It converts videos into motion primitives that can be executed reliably by real-world robots. We demonstrate our approach by transferring the motions of cats, dogs, and humans to example robots including a quadruped (on hardware) and a humanoid (in simulation). To the best knowledge of the authors, this is the first attempt at a general-purpose motion transfer framework that imitates animal and human motions on legged robots directly from casual videos without artificial markers or labels.