 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoes LLM Alignment Really Need Diversity? An Empirical Study of Adapting RLVR Methods for Moral Reasoning
Mar 11, 2026Reinforcement learning with verifiable rewards (RLVR) has achieved remarkable success in logical reasoning tasks, yet whether large language model (LLM) alignment requires fundamentally different approaches remains unclear. Given the apparent tolerance for multiple valid responses in moral reasoning, a natural hypothesis is that alignment tasks inherently require diversity-seeking distribution-matching algorithms rather than reward-maximizing policy-based methods. We conduct the first comprehensive empirical study comparing both paradigms on MoReBench. To enable stable RLVR training, we build a rubric-grounded reward pipeline by training a Qwen3-1.7B judge model. Contrary to our hypothesis, we find that distribution-matching approaches do not demonstrate significant advantages over reward-maximizing methods as expected on alignment tasks. Through semantic visualization mapping high-reward responses to semantic space, we demonstrate that moral reasoning exhibits more concentrated high-reward distributions than mathematical reasoning, where diverse solution strategies yield similarly high rewards. This counter-intuitive finding explains why mode-seeking optimization proves equally or more effective for alignment tasks. Our results suggest that alignment tasks do not inherently require diversity-preserving algorithms, and standard reward-maximizing RLVR methods can effectively transfer to moral reasoning without explicit diversity mechanisms.
Wallbounce : Push wall to navigate with Contact-Implicit MPC
Nov 03, 2024



In this work, we introduce a framework that enables highly maneuverable locomotion using non-periodic contacts. This task is challenging for traditional optimization and planning methods to handle due to difficulties in specifying contact mode sequences in real-time. To address this, we use a bi-level contact-implicit planner and hybrid model predictive controller to draft and execute a motion plan. We investigate how this method allows us to plan arm contact events on the shmoobot, a smaller ballbot, which uses an inverse mouse-ball drive to achieve dynamic balancing with a low number of actuators. Through multiple experiments we show how the arms allow for acceleration, deceleration and dynamic obstacle avoidance that are not achievable with the mouse-ball drive alone. This demonstrates how a holistic approach to locomotion can increase the control authority of unique robot morpohologies without additional hardware by leveraging robot arms that are typically used only for manipulation. Project website: https://cmushmoobot.github.io/Wallbounce
Ubiquitous Field Transportation Robots with Robust Wheel-Leg Transformable Modules
Oct 24, 2024



This paper introduces two field transportation robots. Both robots are equipped with transformable wheel-leg modules, which can smoothly switch between operation modes and can work in various challenging terrains. SWhegPro, with six S-shaped legs, enables transporting loads in challenging uneven outdoor terrains. SWhegPro3, featuring four three-impeller wheels, has surprising stair-climbing performance in indoor scenarios. Different from ordinary gear-driven transformable mechanisms, the modular wheels we designed driven by self-locking electric push rods can switch modes accurately and stably with high loads, significantly improving the load capacity of the robot in leg mode. This study analyzes the robot's wheel-leg module operation when the terrain parameters change. Through the derivation of mathematical models and calculations based on simplified kinematic models, a method for optimizing the robot parameters and wheel-leg structure parameters is finally proposed.The design and control strategy are then verified through simulations and field experiments in various complex terrains, and the working performance of the two field transportation robots is calculated and analyzed by recording sensor data and proposing evaluation methods.
Interactive Navigation with Adaptive Non-prehensile Mobile Manipulation
Oct 17, 2024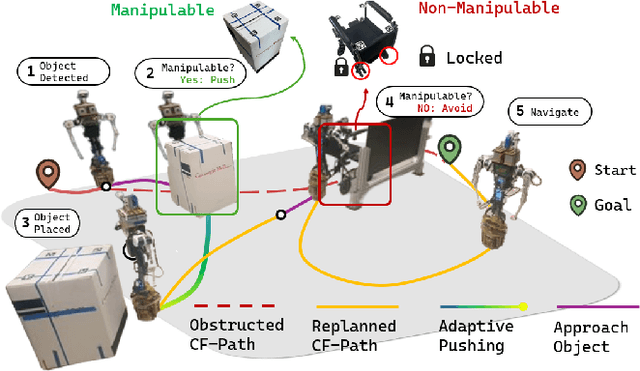
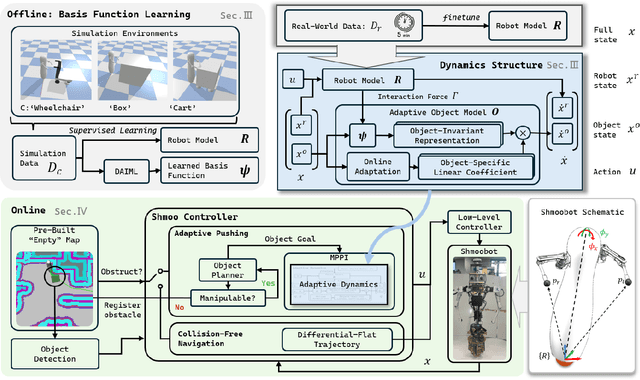
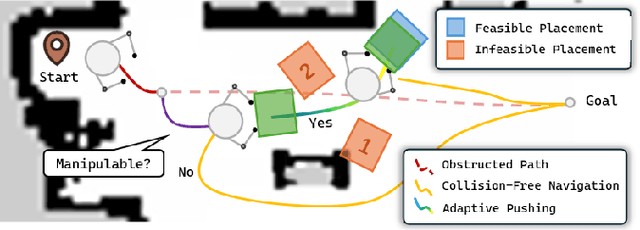
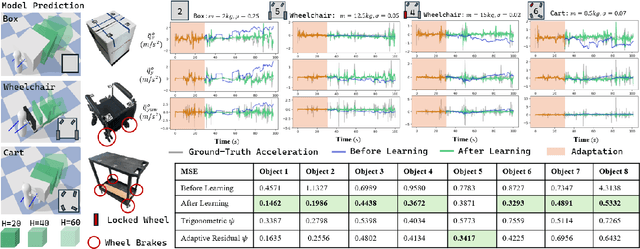
This paper introduces a framework for interactive navigation through adaptive non-prehensile mobile manipulation. A key challenge in this process is handling objects with unknown dynamics, which are difficult to infer from visual observation. To address this, we propose an adaptive dynamics model for common movable indoor objects via learned SE(2) dynamics representations. This model is integrated into Model Predictive Path Integral (MPPI) control to guide the robot's interactions. Additionally, the learned dynamics help inform decision-making when navigating around objects that cannot be manipulated.Our approach is validated in both simulation and real-world scenarios, demonstrating its ability to accurately represent object dynamics and effectively manipulate various objects. We further highlight its success in the Navigation Among Movable Objects (NAMO) task by deploying the proposed framework on a dynamically balancing mobile robot, Shmoobot. Project website: https://cmushmoobot.github.io/AdaptivePushing/.
Wheelchair Maneuvering with a Single-Spherical-Wheeled Balancing Mobile Manipulator
Apr 19, 2024



In this work, we present a control framework to effectively maneuver wheelchairs with a dynamically stable mobile manipulator. Wheelchairs are a type of nonholonomic cart system, maneuvering such systems with mobile manipulators (MM) is challenging mostly due to the following reasons: 1) These systems feature nonholonomic constraints and considerably varying inertial parameters that require online identification and adaptation. 2) These systems are widely used in human-centered environments, which demand the MM to operate in potentially crowded spaces while ensuring compliance for safe physical human-robot interaction (pHRI). We propose a control framework that plans whole-body motion based on quasi-static analysis to maneuver heavy nonholonomic carts while maintaining overall compliance. We validated our approach experimentally by maneuvering a wheelchair with a bimanual mobile manipulator, the CMU ballbot. The experiments demonstrate the proposed framework is able to track desired wheelchair velocity with loads varying from 11.8 kg to 79.4 kg at a maximum linear velocity of 0.45 m/s and angular velocity of 0.3 rad/s. Furthermore, we verified that the proposed method can generate human-like motion smoothness of the wheelchair while ensuring safe interactions with the environment.
The state-of-the-art in Cardiac MRI Reconstruction: Results of the CMRxRecon Challenge in MICCAI 2023
Apr 01, 2024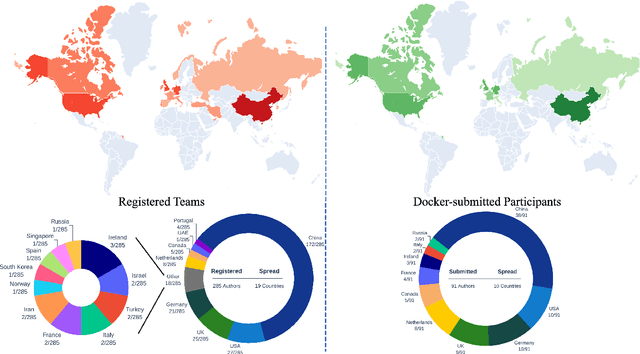
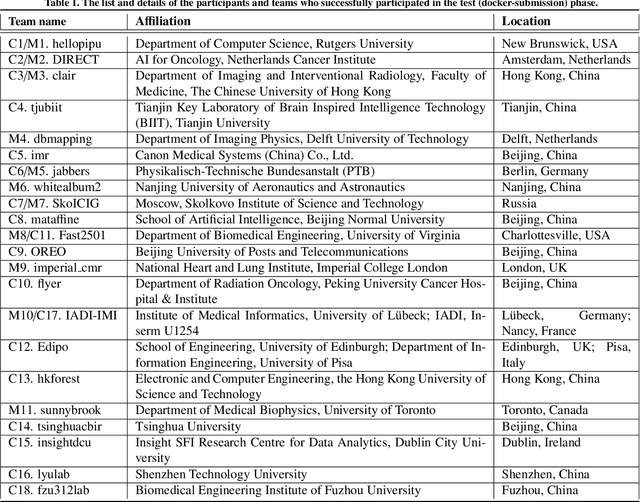
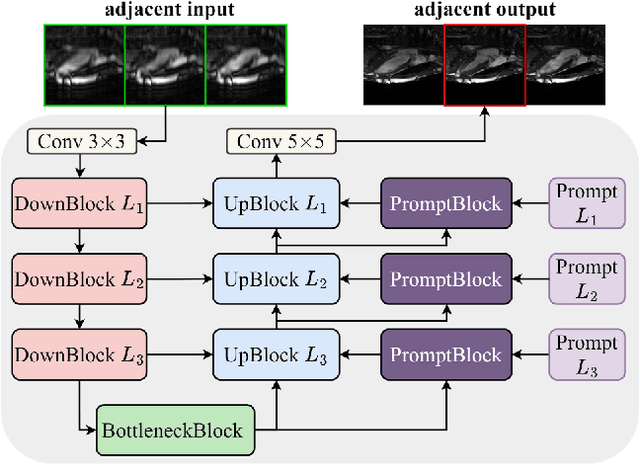
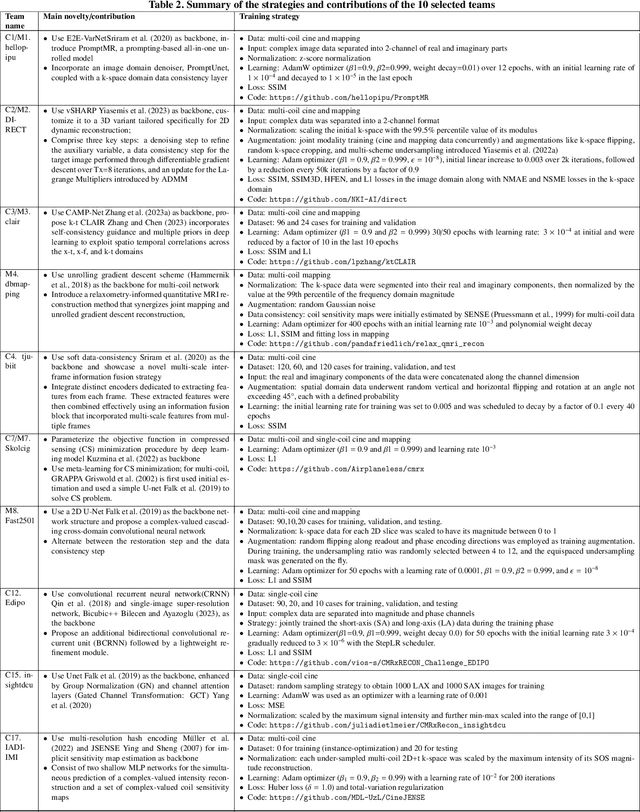
Cardiac MRI, crucial for evaluating heart structure and function, faces limitations like slow imaging and motion artifacts. Undersampling reconstruction, especially data-driven algorithms, has emerged as a promising solution to accelerate scans and enhance imaging performance using highly under-sampled data. Nevertheless, the scarcity of publicly available cardiac k-space datasets and evaluation platform hinder the development of data-driven reconstruction algorithms. To address this issue, we organized the Cardiac MRI Reconstruction Challenge (CMRxRecon) in 2023, in collaboration with the 26th International Conference on MICCAI. CMRxRecon presented an extensive k-space dataset comprising cine and mapping raw data, accompanied by detailed annotations of cardiac anatomical structures. With overwhelming participation, the challenge attracted more than 285 teams and over 600 participants. Among them, 22 teams successfully submitted Docker containers for the testing phase, with 7 teams submitted for both cine and mapping tasks. All teams use deep learning based approaches, indicating that deep learning has predominately become a promising solution for the problem. The first-place winner of both tasks utilizes the E2E-VarNet architecture as backbones. In contrast, U-Net is still the most popular backbone for both multi-coil and single-coil reconstructions. This paper provides a comprehensive overview of the challenge design, presents a summary of the submitted results, reviews the employed methods, and offers an in-depth discussion that aims to inspire future advancements in cardiac MRI reconstruction models. The summary emphasizes the effective strategies observed in Cardiac MRI reconstruction, including backbone architecture, loss function, pre-processing techniques, physical modeling, and model complexity, thereby providing valuable insights for further developments in this field.
FPGA Deployment of LFADS for Real-time Neuroscience Experiments
Feb 02, 2024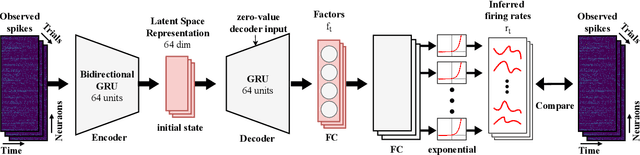
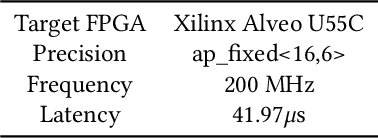
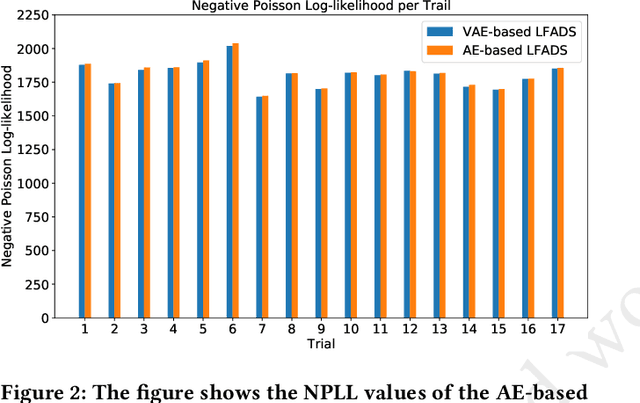
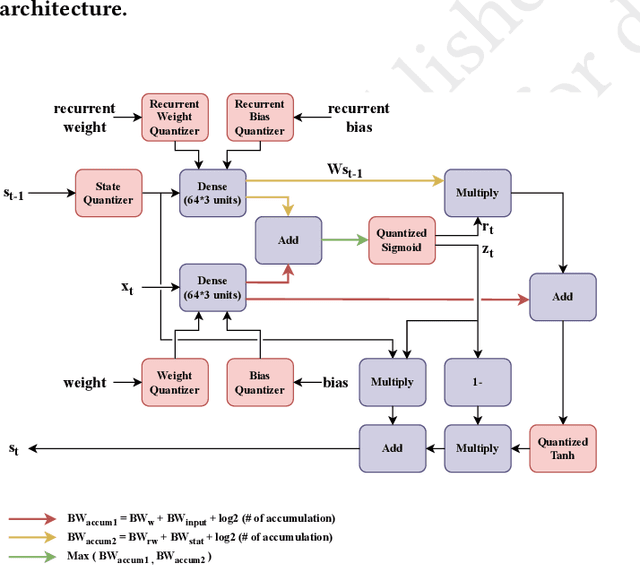
Large-scale recordings of neural activity are providing new opportunities to study neural population dynamics. A powerful method for analyzing such high-dimensional measurements is to deploy an algorithm to learn the low-dimensional latent dynamics. LFADS (Latent Factor Analysis via Dynamical Systems) is a deep learning method for inferring latent dynamics from high-dimensional neural spiking data recorded simultaneously in single trials. This method has shown a remarkable performance in modeling complex brain signals with an average inference latency in milliseconds. As our capacity of simultaneously recording many neurons is increasing exponentially, it is becoming crucial to build capacity for deploying low-latency inference of the computing algorithms. To improve the real-time processing ability of LFADS, we introduce an efficient implementation of the LFADS models onto Field Programmable Gate Arrays (FPGA). Our implementation shows an inference latency of 41.97 $\mu$s for processing the data in a single trial on a Xilinx U55C.
* 6 pages, 8 figures
CycLight: learning traffic signal cooperation with a cycle-level strategy
Jan 16, 2024



This study introduces CycLight, a novel cycle-level deep reinforcement learning (RL) approach for network-level adaptive traffic signal control (NATSC) systems. Unlike most traditional RL-based traffic controllers that focus on step-by-step decision making, CycLight adopts a cycle-level strategy, optimizing cycle length and splits simultaneously using Parameterized Deep Q-Networks (PDQN) algorithm. This cycle-level approach effectively reduces the computational burden associated with frequent data communication, meanwhile enhancing the practicality and safety of real-world applications. A decentralized framework is formulated for multi-agent cooperation, while attention mechanism is integrated to accurately assess the impact of the surroundings on the current intersection. CycLight is tested in a large synthetic traffic grid using the microscopic traffic simulation tool, SUMO. Experimental results not only demonstrate the superiority of CycLight over other state-of-the-art approaches but also showcase its robustness against information transmission delays.
Image Reconstruction for Accelerated MR Scan with Faster Fourier Convolutional Neural Networks
Jun 05, 2023



Partial scan is a common approach to accelerate Magnetic Resonance Imaging (MRI) data acquisition in both 2D and 3D settings. However, accurately reconstructing images from partial scan data (i.e., incomplete k-space matrices) remains challenging due to lack of an effectively global receptive field in both spatial and k-space domains. To address this problem, we propose the following: (1) a novel convolutional operator called Faster Fourier Convolution (FasterFC) to replace the two consecutive convolution operations typically used in convolutional neural networks (e.g., U-Net, ResNet). Based on the spectral convolution theorem in Fourier theory, FasterFC employs alternating kernels of size 1 in 3D case) in different domains to extend the dual-domain receptive field to the global and achieves faster calculation speed than traditional Fast Fourier Convolution (FFC). (2) A 2D accelerated MRI method, FasterFC-End-to-End-VarNet, which uses FasterFC to improve the sensitivity maps and reconstruction quality. (3) A multi-stage 3D accelerated MRI method called FasterFC-based Single-to-group Network (FAS-Net) that utilizes a single-to-group algorithm to guide k-space domain reconstruction, followed by FasterFC-based cascaded convolutional neural networks to expand the effective receptive field in the dual-domain. Experimental results on the fastMRI and Stanford MRI Data datasets demonstrate that FasterFC improves the quality of both 2D and 3D reconstruction. Moreover, FAS-Net, as a 3D high-resolution multi-coil (eight) accelerated MRI method, achieves superior reconstruction performance in both qualitative and quantitative results compared with state-of-the-art 2D and 3D methods.
SWheg: A Wheel-Leg Transformable Robot With Minimalist Actuator Realization
Oct 27, 2022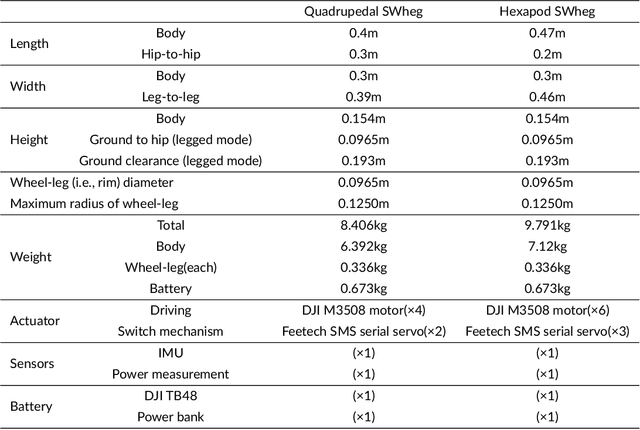
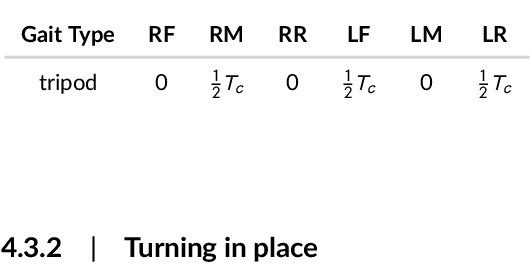
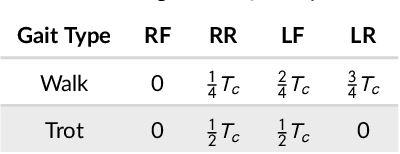
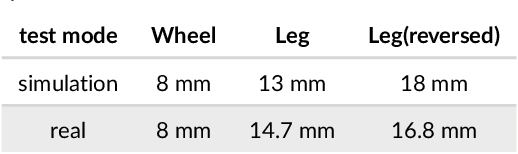
This article presents the design, implementation, and performance evaluation of SWheg, a novel modular wheel-leg transformable robot family with minimalist actuator realization. SWheg takes advantage of both wheeled and legged locomotion by seamlessly integrating them on a single platform. In contrast to other designs that use multiple actuators, SWheg uses only one actuator to drive the transformation of all the wheel-leg modules in sync. This means an N-legged SWheg robot requires only N+1 actuators, which can significantly reduce the cost and malfunction rate of the platform. The tendon-driven wheel-leg transformation mechanism based on a four-bar linkage can perform fast morphology transitions between wheels and legs. We validated the design principle with two SWheg robots with four and six wheel-leg modules separately, namely Quadrupedal SWheg and Hexapod SWheg. The design process, mechatronics infrastructure, and the gait behavioral development of both platforms were discussed. The performance of the robot was evaluated in various scenarios, including driving and turning in wheeled mode, step crossing, irregular terrain passing, and stair climbing in legged mode. The comparison between these two platforms was also discussed.