 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUbiquitous Field Transportation Robots with Robust Wheel-Leg Transformable Modules
Oct 24, 2024



This paper introduces two field transportation robots. Both robots are equipped with transformable wheel-leg modules, which can smoothly switch between operation modes and can work in various challenging terrains. SWhegPro, with six S-shaped legs, enables transporting loads in challenging uneven outdoor terrains. SWhegPro3, featuring four three-impeller wheels, has surprising stair-climbing performance in indoor scenarios. Different from ordinary gear-driven transformable mechanisms, the modular wheels we designed driven by self-locking electric push rods can switch modes accurately and stably with high loads, significantly improving the load capacity of the robot in leg mode. This study analyzes the robot's wheel-leg module operation when the terrain parameters change. Through the derivation of mathematical models and calculations based on simplified kinematic models, a method for optimizing the robot parameters and wheel-leg structure parameters is finally proposed.The design and control strategy are then verified through simulations and field experiments in various complex terrains, and the working performance of the two field transportation robots is calculated and analyzed by recording sensor data and proposing evaluation methods.
Navigating Spatio-Temporal Heterogeneity: A Graph Transformer Approach for Traffic Forecasting
Aug 20, 2024



Traffic forecasting has emerged as a crucial research area in the development of smart cities. Although various neural networks with intricate architectures have been developed to address this problem, they still face two key challenges: i) Recent advancements in network designs for modeling spatio-temporal correlations are starting to see diminishing returns in performance enhancements. ii) Additionally, most models do not account for the spatio-temporal heterogeneity inherent in traffic data, i.e., traffic distribution varies significantly across different regions and traffic flow patterns fluctuate across various time slots. To tackle these challenges, we introduce the Spatio-Temporal Graph Transformer (STGormer), which effectively integrates attribute and structure information inherent in traffic data for learning spatio-temporal correlations, and a mixture-of-experts module for capturing heterogeneity along spaital and temporal axes. Specifically, we design two straightforward yet effective spatial encoding methods based on the graph structure and integrate time position encoding into the vanilla transformer to capture spatio-temporal traffic patterns. Additionally, a mixture-of-experts enhanced feedforward neural network (FNN) module adaptively assigns suitable expert layers to distinct patterns via a spatio-temporal gating network, further improving overall prediction accuracy. Experiments on five real-world datasets demonstrate that STGormer achieves state-of-the-art performance.
Low-rank Adaptation for Spatio-Temporal Forecasting
Apr 11, 2024



Spatio-temporal forecasting is crucial in real-world dynamic systems, predicting future changes using historical data from diverse locations. Existing methods often prioritize the development of intricate neural networks to capture the complex dependencies of the data, yet their accuracy fails to show sustained improvement. Besides, these methods also overlook node heterogeneity, hindering customized prediction modules from handling diverse regional nodes effectively. In this paper, our goal is not to propose a new model but to present a novel low-rank adaptation framework as an off-the-shelf plugin for existing spatial-temporal prediction models, termed ST-LoRA, which alleviates the aforementioned problems through node-level adjustments. Specifically, we first tailor a node adaptive low-rank layer comprising multiple trainable low-rank matrices. Additionally, we devise a multi-layer residual fusion stacking module, injecting the low-rank adapters into predictor modules of various models. Across six real-world traffic datasets and six different types of spatio-temporal prediction models, our approach minimally increases the parameters and training time of the original models by less than 4%, still achieving consistent and sustained performance enhancement.
SWheg: A Wheel-Leg Transformable Robot With Minimalist Actuator Realization
Oct 27, 2022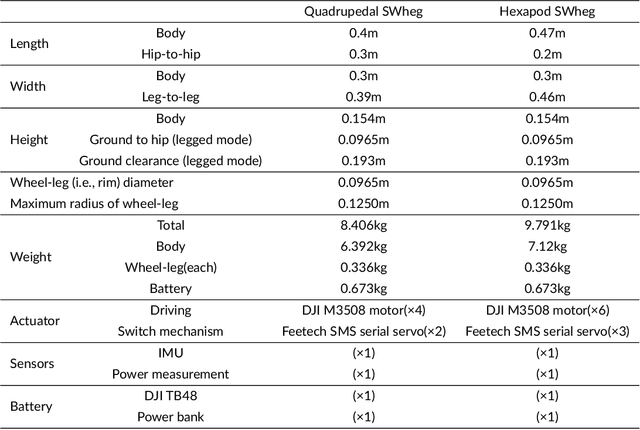
This article presents the design, implementation, and performance evaluation of SWheg, a novel modular wheel-leg transformable robot family with minimalist actuator realization. SWheg takes advantage of both wheeled and legged locomotion by seamlessly integrating them on a single platform. In contrast to other designs that use multiple actuators, SWheg uses only one actuator to drive the transformation of all the wheel-leg modules in sync. This means an N-legged SWheg robot requires only N+1 actuators, which can significantly reduce the cost and malfunction rate of the platform. The tendon-driven wheel-leg transformation mechanism based on a four-bar linkage can perform fast morphology transitions between wheels and legs. We validated the design principle with two SWheg robots with four and six wheel-leg modules separately, namely Quadrupedal SWheg and Hexapod SWheg. The design process, mechatronics infrastructure, and the gait behavioral development of both platforms were discussed. The performance of the robot was evaluated in various scenarios, including driving and turning in wheeled mode, step crossing, irregular terrain passing, and stair climbing in legged mode. The comparison between these two platforms was also discussed.