 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUbiquitous Field Transportation Robots with Robust Wheel-Leg Transformable Modules
Oct 24, 2024



This paper introduces two field transportation robots. Both robots are equipped with transformable wheel-leg modules, which can smoothly switch between operation modes and can work in various challenging terrains. SWhegPro, with six S-shaped legs, enables transporting loads in challenging uneven outdoor terrains. SWhegPro3, featuring four three-impeller wheels, has surprising stair-climbing performance in indoor scenarios. Different from ordinary gear-driven transformable mechanisms, the modular wheels we designed driven by self-locking electric push rods can switch modes accurately and stably with high loads, significantly improving the load capacity of the robot in leg mode. This study analyzes the robot's wheel-leg module operation when the terrain parameters change. Through the derivation of mathematical models and calculations based on simplified kinematic models, a method for optimizing the robot parameters and wheel-leg structure parameters is finally proposed.The design and control strategy are then verified through simulations and field experiments in various complex terrains, and the working performance of the two field transportation robots is calculated and analyzed by recording sensor data and proposing evaluation methods.
CARLA-Loc: Synthetic SLAM Dataset with Full-stack Sensor Setup in Challenging Weather and Dynamic Environments
Sep 16, 2023The robustness of SLAM algorithms in challenging environmental conditions is crucial for autonomous driving, but the impact of these conditions are unknown while given the difficulty of arbitrarily changing the relevant environmental parameters of the same environment in the real world. Therefore, we propose CARLA-Loc, a synthetic dataset of challenging and dynamic environments built on CARLA simulator. We integrate multiple sensors into the dataset with strict calibration, synchronization and precise timestamping. 7 maps and 42 sequences are posed in our dataset with different dynamic levels and weather conditions. Objects in both stereo images and point clouds are well-segmented with their class labels. We evaluate 5 visual-based and 4 LiDAR-based approaches on varies sequences and analyze the effect of challenging environmental factors on the localization accuracy, showing the applicability of proposed dataset for validating SLAM algorithms.
SWheg: A Wheel-Leg Transformable Robot With Minimalist Actuator Realization
Oct 27, 2022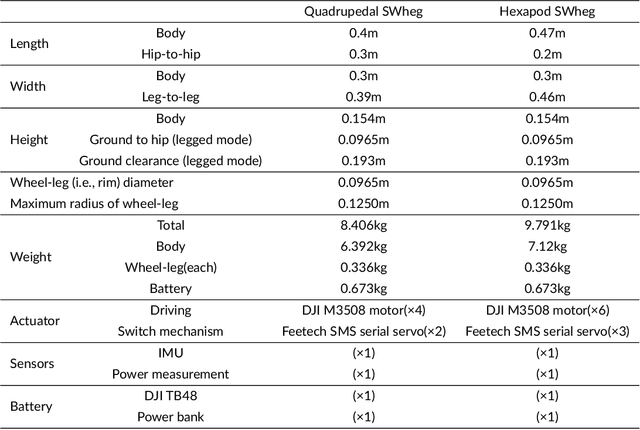
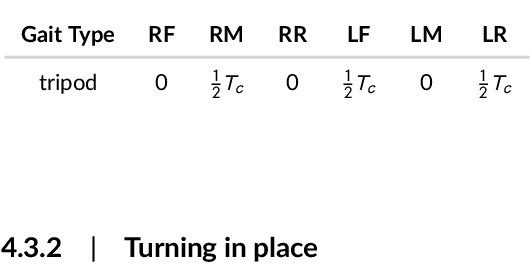
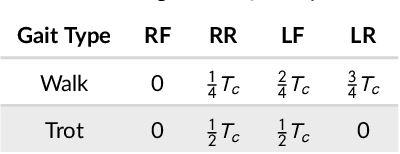
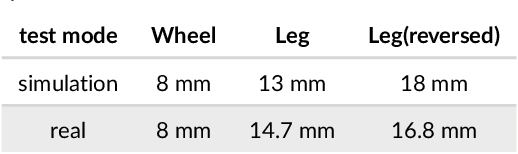
This article presents the design, implementation, and performance evaluation of SWheg, a novel modular wheel-leg transformable robot family with minimalist actuator realization. SWheg takes advantage of both wheeled and legged locomotion by seamlessly integrating them on a single platform. In contrast to other designs that use multiple actuators, SWheg uses only one actuator to drive the transformation of all the wheel-leg modules in sync. This means an N-legged SWheg robot requires only N+1 actuators, which can significantly reduce the cost and malfunction rate of the platform. The tendon-driven wheel-leg transformation mechanism based on a four-bar linkage can perform fast morphology transitions between wheels and legs. We validated the design principle with two SWheg robots with four and six wheel-leg modules separately, namely Quadrupedal SWheg and Hexapod SWheg. The design process, mechatronics infrastructure, and the gait behavioral development of both platforms were discussed. The performance of the robot was evaluated in various scenarios, including driving and turning in wheeled mode, step crossing, irregular terrain passing, and stair climbing in legged mode. The comparison between these two platforms was also discussed.