 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAGI-Elo: How Far Are We From Mastering A Task?
May 19, 2025As the field progresses toward Artificial General Intelligence (AGI), there is a pressing need for more comprehensive and insightful evaluation frameworks that go beyond aggregate performance metrics. This paper introduces a unified rating system that jointly models the difficulty of individual test cases and the competency of AI models (or humans) across vision, language, and action domains. Unlike existing metrics that focus solely on models, our approach allows for fine-grained, difficulty-aware evaluations through competitive interactions between models and tasks, capturing both the long-tail distribution of real-world challenges and the competency gap between current models and full task mastery. We validate the generalizability and robustness of our system through extensive experiments on multiple established datasets and models across distinct AGI domains. The resulting rating distributions offer novel perspectives and interpretable insights into task difficulty, model progression, and the outstanding challenges that remain on the path to achieving full AGI task mastery.
DRAMA: An Efficient End-to-end Motion Planner for Autonomous Driving with Mamba
Aug 07, 2024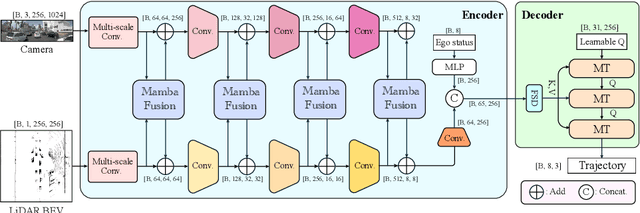



Motion planning is a challenging task to generate safe and feasible trajectories in highly dynamic and complex environments, forming a core capability for autonomous vehicles. In this paper, we propose DRAMA, the first Mamba-based end-to-end motion planner for autonomous vehicles. DRAMA fuses camera, LiDAR Bird's Eye View images in the feature space, as well as ego status information, to generate a series of future ego trajectories. Unlike traditional transformer-based methods with quadratic attention complexity for sequence length, DRAMA is able to achieve a less computationally intensive attention complexity, demonstrating potential to deal with increasingly complex scenarios. Leveraging our Mamba fusion module, DRAMA efficiently and effectively fuses the features of the camera and LiDAR modalities. In addition, we introduce a Mamba-Transformer decoder that enhances the overall planning performance. This module is universally adaptable to any Transformer-based model, especially for tasks with long sequence inputs. We further introduce a novel feature state dropout which improves the planner's robustness without increasing training and inference times. Extensive experimental results show that DRAMA achieves higher accuracy on the NAVSIM dataset compared to the baseline Transfuser, with fewer parameters and lower computational costs.
DriveSceneGen: Generating Diverse and Realistic Driving Scenarios from Scratch
Sep 26, 2023



Realistic and diverse traffic scenarios in large quantities are crucial for the development and validation of autonomous driving systems. However, owing to numerous difficulties in the data collection process and the reliance on intensive annotations, real-world datasets lack sufficient quantity and diversity to support the increasing demand for data. This work introduces DriveSceneGen, a data-driven driving scenario generation method that learns from the real-world driving dataset and generates entire dynamic driving scenarios from scratch. DriveSceneGen is able to generate novel driving scenarios that align with real-world data distributions with high fidelity and diversity. Experimental results on 5k generated scenarios highlight the generation quality, diversity, and scalability compared to real-world datasets. To the best of our knowledge, DriveSceneGen is the first method that generates novel driving scenarios involving both static map elements and dynamic traffic participants from scratch.
CARLA-Loc: Synthetic SLAM Dataset with Full-stack Sensor Setup in Challenging Weather and Dynamic Environments
Sep 16, 2023The robustness of SLAM algorithms in challenging environmental conditions is crucial for autonomous driving, but the impact of these conditions are unknown while given the difficulty of arbitrarily changing the relevant environmental parameters of the same environment in the real world. Therefore, we propose CARLA-Loc, a synthetic dataset of challenging and dynamic environments built on CARLA simulator. We integrate multiple sensors into the dataset with strict calibration, synchronization and precise timestamping. 7 maps and 42 sequences are posed in our dataset with different dynamic levels and weather conditions. Objects in both stereo images and point clouds are well-segmented with their class labels. We evaluate 5 visual-based and 4 LiDAR-based approaches on varies sequences and analyze the effect of challenging environmental factors on the localization accuracy, showing the applicability of proposed dataset for validating SLAM algorithms.