 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Navigation with Adaptive Non-prehensile Mobile Manipulation
Paper and Code
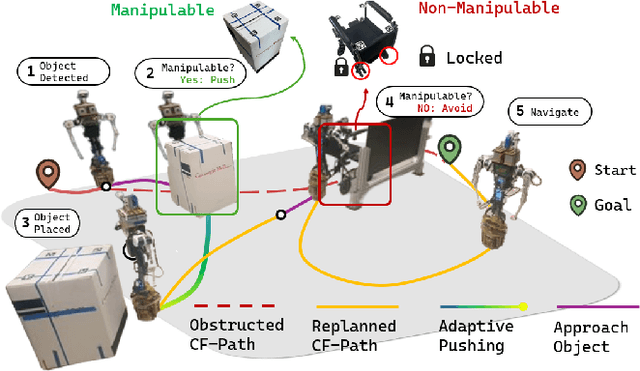
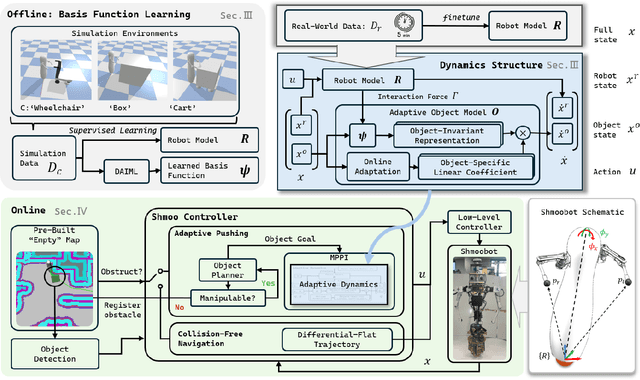
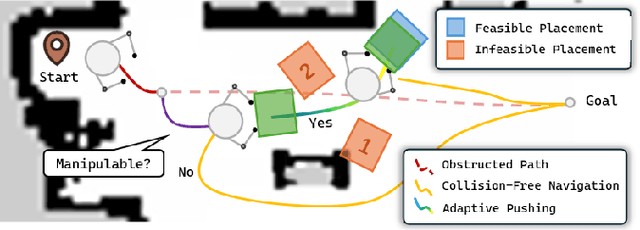
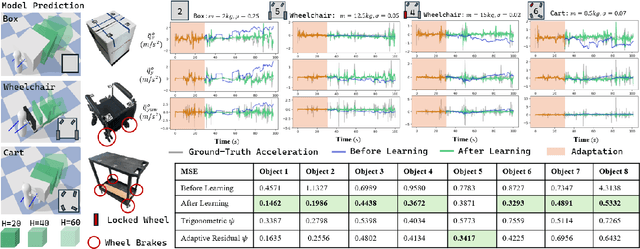
This paper introduces a framework for interactive navigation through adaptive non-prehensile mobile manipulation. A key challenge in this process is handling objects with unknown dynamics, which are difficult to infer from visual observation. To address this, we propose an adaptive dynamics model for common movable indoor objects via learned SE(2) dynamics representations. This model is integrated into Model Predictive Path Integral (MPPI) control to guide the robot's interactions. Additionally, the learned dynamics help inform decision-making when navigating around objects that cannot be manipulated.Our approach is validated in both simulation and real-world scenarios, demonstrating its ability to accurately represent object dynamics and effectively manipulate various objects. We further highlight its success in the Navigation Among Movable Objects (NAMO) task by deploying the proposed framework on a dynamically balancing mobile robot, Shmoobot. Project website: https://cmushmoobot.github.io/AdaptivePushing/.