 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWallbounce : Push wall to navigate with Contact-Implicit MPC
Nov 03, 2024



In this work, we introduce a framework that enables highly maneuverable locomotion using non-periodic contacts. This task is challenging for traditional optimization and planning methods to handle due to difficulties in specifying contact mode sequences in real-time. To address this, we use a bi-level contact-implicit planner and hybrid model predictive controller to draft and execute a motion plan. We investigate how this method allows us to plan arm contact events on the shmoobot, a smaller ballbot, which uses an inverse mouse-ball drive to achieve dynamic balancing with a low number of actuators. Through multiple experiments we show how the arms allow for acceleration, deceleration and dynamic obstacle avoidance that are not achievable with the mouse-ball drive alone. This demonstrates how a holistic approach to locomotion can increase the control authority of unique robot morpohologies without additional hardware by leveraging robot arms that are typically used only for manipulation. Project website: https://cmushmoobot.github.io/Wallbounce
Interactive Navigation with Adaptive Non-prehensile Mobile Manipulation
Oct 17, 2024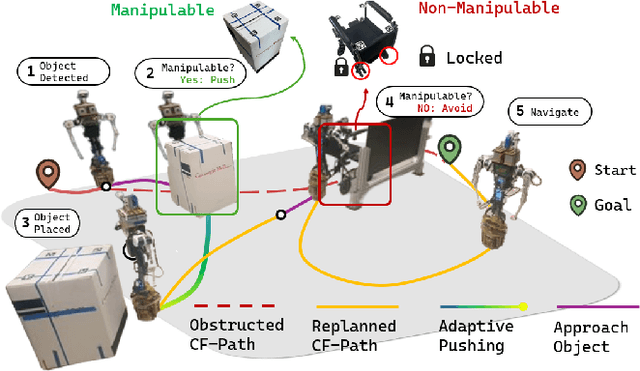
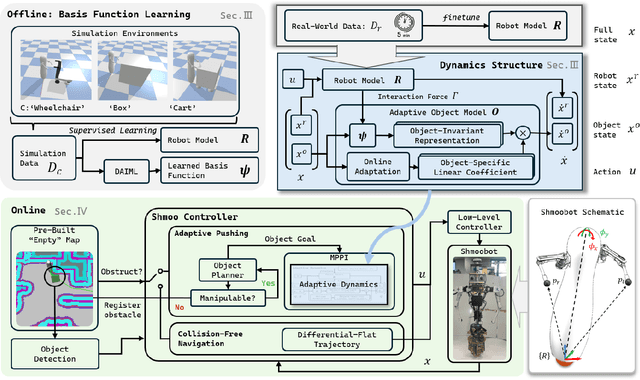
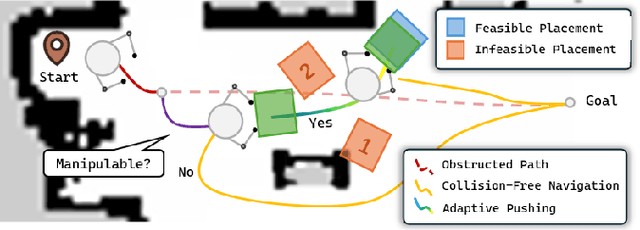
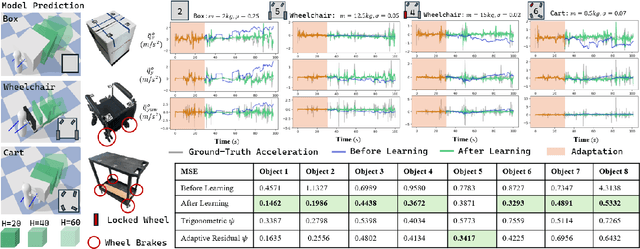
This paper introduces a framework for interactive navigation through adaptive non-prehensile mobile manipulation. A key challenge in this process is handling objects with unknown dynamics, which are difficult to infer from visual observation. To address this, we propose an adaptive dynamics model for common movable indoor objects via learned SE(2) dynamics representations. This model is integrated into Model Predictive Path Integral (MPPI) control to guide the robot's interactions. Additionally, the learned dynamics help inform decision-making when navigating around objects that cannot be manipulated.Our approach is validated in both simulation and real-world scenarios, demonstrating its ability to accurately represent object dynamics and effectively manipulate various objects. We further highlight its success in the Navigation Among Movable Objects (NAMO) task by deploying the proposed framework on a dynamically balancing mobile robot, Shmoobot. Project website: https://cmushmoobot.github.io/AdaptivePushing/.
Wheelchair Maneuvering with a Single-Spherical-Wheeled Balancing Mobile Manipulator
Apr 19, 2024



In this work, we present a control framework to effectively maneuver wheelchairs with a dynamically stable mobile manipulator. Wheelchairs are a type of nonholonomic cart system, maneuvering such systems with mobile manipulators (MM) is challenging mostly due to the following reasons: 1) These systems feature nonholonomic constraints and considerably varying inertial parameters that require online identification and adaptation. 2) These systems are widely used in human-centered environments, which demand the MM to operate in potentially crowded spaces while ensuring compliance for safe physical human-robot interaction (pHRI). We propose a control framework that plans whole-body motion based on quasi-static analysis to maneuver heavy nonholonomic carts while maintaining overall compliance. We validated our approach experimentally by maneuvering a wheelchair with a bimanual mobile manipulator, the CMU ballbot. The experiments demonstrate the proposed framework is able to track desired wheelchair velocity with loads varying from 11.8 kg to 79.4 kg at a maximum linear velocity of 0.45 m/s and angular velocity of 0.3 rad/s. Furthermore, we verified that the proposed method can generate human-like motion smoothness of the wheelchair while ensuring safe interactions with the environment.