 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMediating between Contact Feasibility and Robustness of Trajectory Optimization through Chance Complementarity Constraints
May 20, 2021



As robots move from the laboratory into the real world, motion planning will need to account for model uncertainty and risk. For robot motions involving intermittent contact, planning for uncertainty in contact is especially important, as failure to successfully make and maintain contact can be catastrophic. Here, we model uncertainty in terrain geometry and friction characteristics, and combine a risk-sensitive objective with chance constraints to provide a trade-off between robustness to uncertainty and constraint satisfaction with an arbitrarily high feasibility guarantee. We evaluate our approach in two simple examples: a push-block system for benchmarking and a single-legged hopper. We demonstrate that chance constraints alone produce trajectories similar to those produced using strict complementarity constraints; however, when equipped with a robust objective, we show the chance constraints can mediate a trade-off between robustness to uncertainty and strict constraint satisfaction and also reduce the solve time compared to using the robust cost alone. Thus, our study may represent an important step towards reasoning about contact uncertainty in motion planning.
Robust Trajectory Optimization over Uncertain Terrain with Stochastic Complementarity
Sep 25, 2020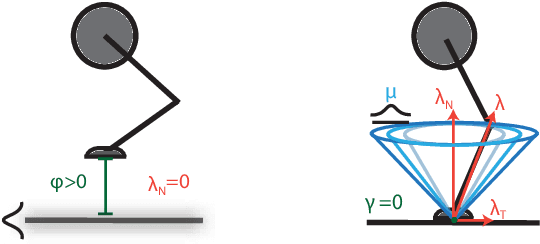
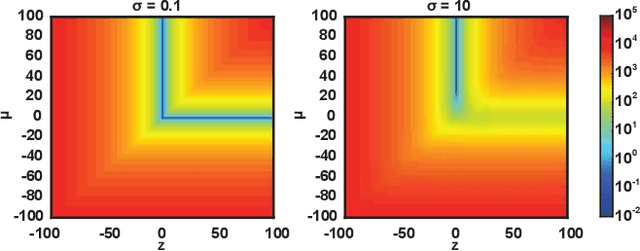
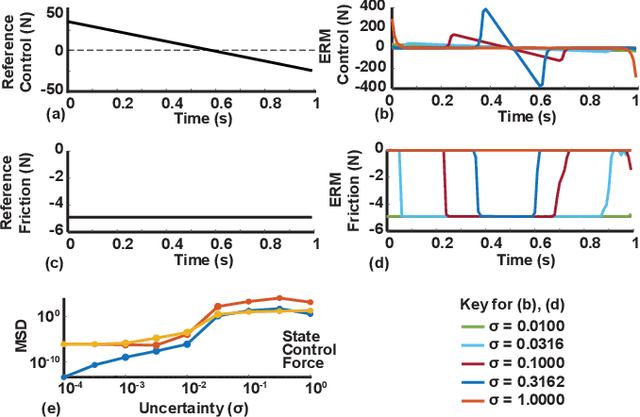
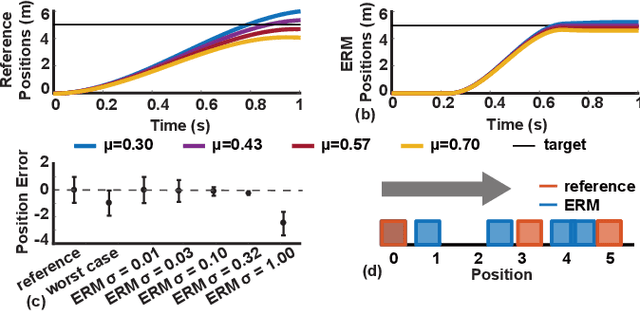
Trajectory optimization with contact-rich behaviors has recently gained attention for generating diverse locomotion behaviors without pre-specified ground contact sequences. However, these approaches rely on precise models of robot dynamics and the terrain and are susceptible to uncertainty. Recent works have attempted to handle uncertainties in the system model, but few have investigated uncertainty in contact dynamics. In this study, we model uncertainty stemming from the terrain and design corresponding risk-sensitive objectives under the framework of contact-implicit trajectory optimization. In particular, we parameterize uncertainties from the terrain contact distance and friction coefficients using probability distributions and propose a corresponding expected residual minimization cost design approach. We evaluate our method in three simple robotic examples, including a legged hopping robot, and we benchmark one of our examples in simulation against a robust worst-case solution. We show that our risk-sensitive method produces contact-averse trajectories that are robust to terrain perturbations. Moreover, we demonstrate that the resulting trajectories converge to those generated by a traditional, non-robust method as the terrain model becomes more certain. Our study marks an important step towards a fully robust, contact-implicit approach suitable for deploying robots on real-world terrain.