 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation
Oct 30, 2025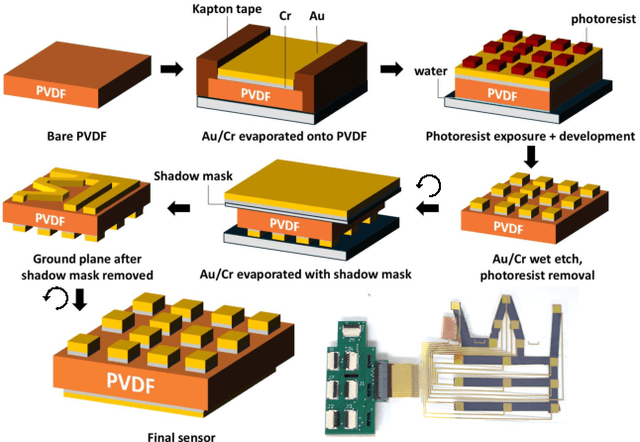
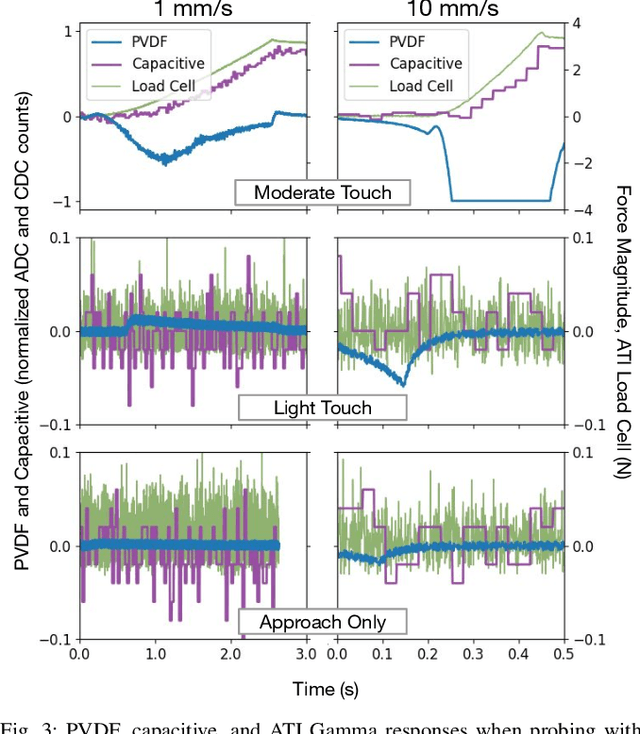
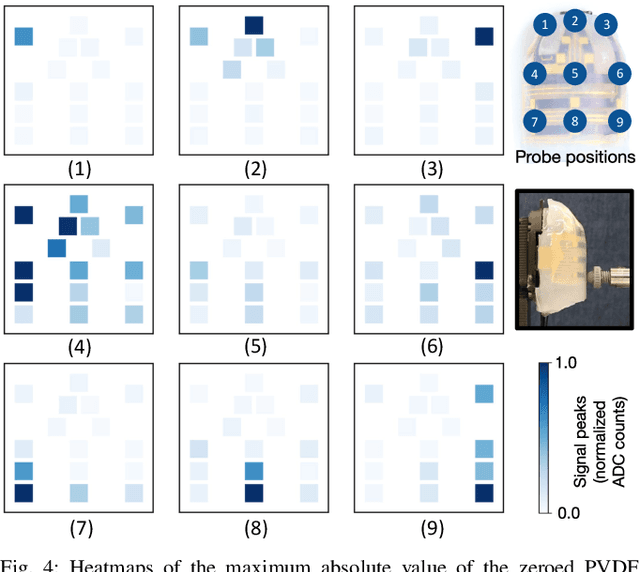
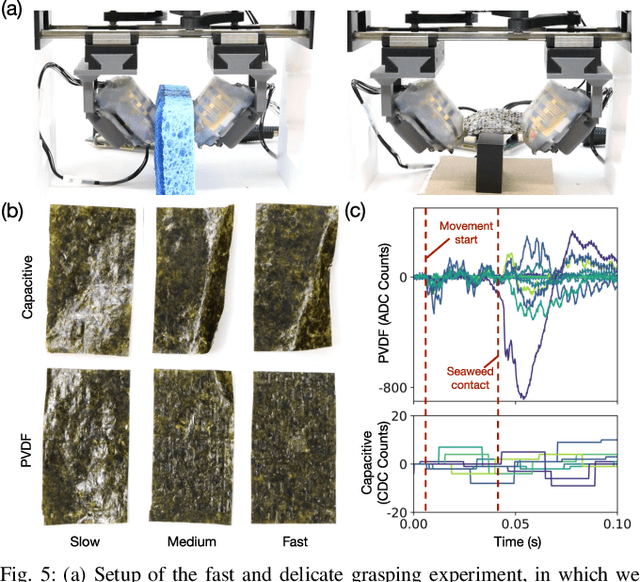
In this work, we introduce SpikeATac, a multimodal tactile finger combining a taxelized and highly sensitive dynamic response (PVDF) with a static transduction method (capacitive) for multimodal touch sensing. Named for its `spiky' response, SpikeATac's 16-taxel PVDF film sampled at 4 kHz provides fast, sensitive dynamic signals to the very onset and breaking of contact. We characterize the sensitivity of the different modalities, and show that SpikeATac provides the ability to stop quickly and delicately when grasping fragile, deformable objects. Beyond parallel grasping, we show that SpikeATac can be used in a learning-based framework to achieve new capabilities on a dexterous multifingered robot hand. We use a learning recipe that combines reinforcement learning from human feedback with tactile-based rewards to fine-tune the behavior of a policy to modulate force. Our hardware platform and learning pipeline together enable a difficult dexterous and contact-rich task that has not previously been achieved: in-hand manipulation of fragile objects. Videos are available at \href{https://roamlab.github.io/spikeatac/}{roamlab.github.io/spikeatac}.
VibeCheck: Using Active Acoustic Tactile Sensing for Contact-Rich Manipulation
Apr 22, 2025The acoustic response of an object can reveal a lot about its global state, for example its material properties or the extrinsic contacts it is making with the world. In this work, we build an active acoustic sensing gripper equipped with two piezoelectric fingers: one for generating signals, the other for receiving them. By sending an acoustic vibration from one finger to the other through an object, we gain insight into an object's acoustic properties and contact state. We use this system to classify objects, estimate grasping position, estimate poses of internal structures, and classify the types of extrinsic contacts an object is making with the environment. Using our contact type classification model, we tackle a standard long-horizon manipulation problem: peg insertion. We use a simple simulated transition model based on the performance of our sensor to train an imitation learning policy that is robust to imperfect predictions from the classifier. We finally demonstrate the policy on a UR5 robot with active acoustic sensing as the only feedback.
A Compact, Low-cost Force and Torque Sensor for Robot Fingers with LED-based Displacement Sensing
Oct 04, 2024



Force/torque sensing is an important modality for robotic manipulation, but commodity solutions, generally developed with other applications in mind, do not generally fit the needs of robot hands. This paper introduces a novel method for six-axis force/torque sensing, using LEDs to sense the displacement between two plates connected by a transparent elastomer. Our method allows for finger-size packaging with no amplification electronics, low cost manufacturing, and easy integration into a complete hand. On test forces between 0-2 N, our prototype sensor exhibits a mean error between 0.05 and 0.07 N across the three force directions, suggesting future applicability to fine manipulation tasks.
The UmboMic: A PVDF Cantilever Microphone
Dec 22, 2023Objective: We present the "UmboMic," a prototype piezoelectric cantilever microphone designed for future use with totally-implantable cochlear implants. Methods: The UmboMic sensor is made from polyvinylidene difluoride (PVDF) because of its low Young's modulus and biocompatibility. The sensor is designed to fit in the middle ear and measure the motion of the underside of the eardrum at the umbo. To maximize its performance, we developed a low noise charge amplifier in tandem with the UmboMic sensor. This paper presents the performance of the UmboMic sensor and amplifier in fresh cadaveric human temporal bones. Results: When tested in human temporal bones, the UmboMic apparatus achieves an equivalent input noise of 32.3 dB SPL over the frequency range 100 Hz to 7 kHz, good linearity, and a flat frequency response to within 10 dB from about 100 Hz to 6 kHz. Conclusion: These results demonstrate the feasibility of a PVDF-based microphone when paired with a low-noise amplifier. The reported UmboMic apparatus is comparable in performance to a conventional hearing aid microphone. Significance: The proof-of-concept UmboMic apparatus is a promising step towards creating a totally-implantable cochlear implant. A completely internal system would enhance the quality of life of cochlear implant users.
An Implantable Piezofilm Middle Ear Microphone: Performance in Human Cadaveric Temporal Bones
Dec 22, 2023Purpose: One of the major reasons that totally implantable cochlear microphones are not readily available is the lack of good implantable microphones. An implantable microphone has the potential to provide a range of benefits over external microphones for cochlear implant users including the filtering ability of the outer ear, cosmetics, and usability in all situations. This paper presents results from experiments in human cadaveric ears of a piezofilm microphone concept under development as a possible component of a future implantable microphone system for use with cochlear implants. This microphone is referred to here as a drum microphone (DrumMic) that senses the robust and predictable motion of the umbo, the tip of the malleus. Methods: The performance was measured of five DrumMics inserted in four different human cadaveric temporal bones. Sensitivity, linearity, bandwidth, and equivalent input noise were measured during these experiments using a sound stimulus and measurement setup. Results: The sensitivity of the DrumMics was found to be tightly clustered across different microphones and ears despite differences in umbo and middle ear anatomy. The DrumMics were shown to behave linearly across a large dynamic range (46 dB SPL to 100 dB SPL) across a wide bandwidth (100 Hz to 8 kHz). The equivalent input noise (0.1-10 kHz) of the DrumMic and amplifier referenced to the ear canal was measured to be 54 dB SPL and estimated to be 46 dB SPL after accounting for the pressure gain of the outer ear. Conclusion: The results demonstrate that the DrumMic behaves robustly across ears and fabrication. The equivalent input noise performance was shown to approach that of commercial hearing aid microphones. To advance this demonstration of the DrumMic concept to a future prototype implantable in humans, work on encapsulation, biocompatibility, connectorization will be required.
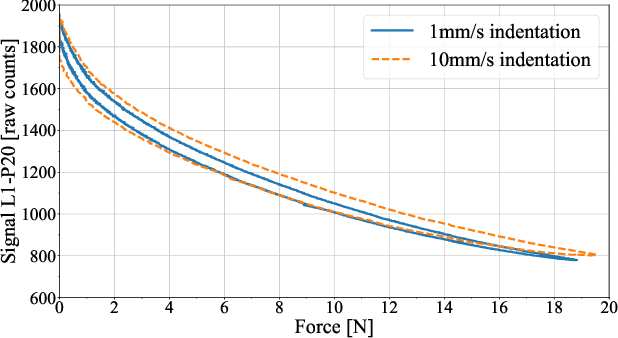
An Investigation of Multi-feature Extraction and Super-resolution with Fast Microphone Arrays
Sep 30, 2023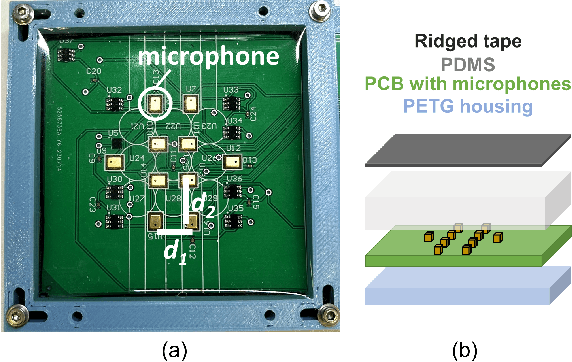
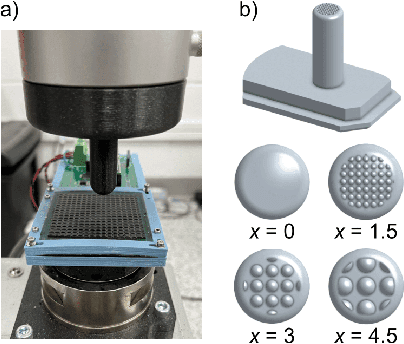
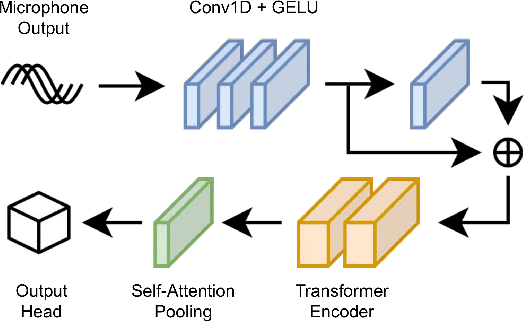

In this work, we use MEMS microphones as vibration sensors to simultaneously classify texture and estimate contact position and velocity. Vibration sensors are an important facet of both human and robotic tactile sensing, providing fast detection of contact and onset of slip. Microphones are an attractive option for implementing vibration sensing as they offer a fast response and can be sampled quickly, are affordable, and occupy a very small footprint. Our prototype sensor uses only a sparse array of distributed MEMS microphones (8-9 mm spacing) embedded under an elastomer. We use transformer-based architectures for data analysis, taking advantage of the microphones' high sampling rate to run our models on time-series data as opposed to individual snapshots. This approach allows us to obtain 77.3% average accuracy on 4-class texture classification (84.2% when excluding the slowest drag velocity), 1.5 mm median error on contact localization, and 4.5 mm/s median error on contact velocity. We show that the learned texture and localization models are robust to varying velocity and generalize to unseen velocities. We also report that our sensor provides fast contact detection, an important advantage of fast transducers. This investigation illustrates the capabilities one can achieve with a MEMS microphone array alone, leaving valuable sensor real estate available for integration with complementary tactile sensing modalities.
A Sensorized Multicurved Robot Finger with Data-driven Touch Sensing via Overlapping Light Signals
Apr 01, 2020


Despite significant advances in touch and force transduction, tactile sensing is still far from ubiquitous in robotic manipulation. Existing methods for building touch sensors have proven difficult to integrate into robot fingers due to multiple challenges, including difficulty in covering multicurved surfaces, high wire count, or packaging constrains preventing their use in dexterous hands. In this paper, we present a multicurved robotic finger with accurate touch localization and normal force detection over complex, three-dimensional surfaces. The key to our approach is the novel use of overlapping signals from light emitters and receivers embedded in a transparent waveguide layer that covers the functional areas of the finger. By measuring light transport between every emitter and receiver, we show that we can obtain a very rich signal set that changes in response to deformation of the finger due to touch. We then show that purely data-driven deep learning methods are able to extract useful information from such data, such as contact location and applied normal force, without the need for analytical models. The final result is a fully integrated, sensorized robot finger, with a low wire count and using easily accessible manufacturing methods, designed for easy integration into dexterous manipulators.
Data-driven Tactile Sensing using Spatially Overlapping Signals
Feb 22, 2018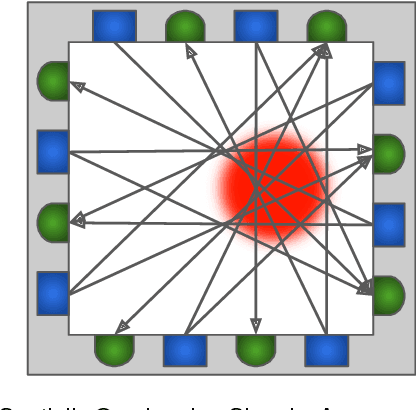
Traditional methods for achieving high localization accuracy on tactile sensors usually involve a matrix of miniaturized individual sensors distributed on the area of interest. This approach usually comes at a price of increased complexity in fabrication and circuitry, and can be hard to adapt to non-planar geometries. We propose a method where sensing terminals are embedded in a volume of soft material. Mechanical strain in this material results in a measurable signal between any two given terminals. By having multiple terminals and pairing them against each other in all possible combinations, we obtain a rich signal set using few wires. We mine this data to learn the mapping between the signals we extract and the contact parameters of interest. Our approach is general enough that it can be applied with different transduction methods, and achieves high accuracy in identifying indentation location and depth. Moreover, this method lends itself to simple fabrication techniques and makes no assumption about the underlying geometry, potentially simplifying future integration in robot hands.
Accurate Contact Localization and Indentation Depth Prediction With an Optics-based Tactile Sensor
Feb 19, 2018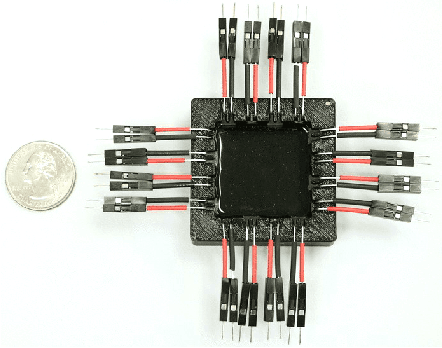
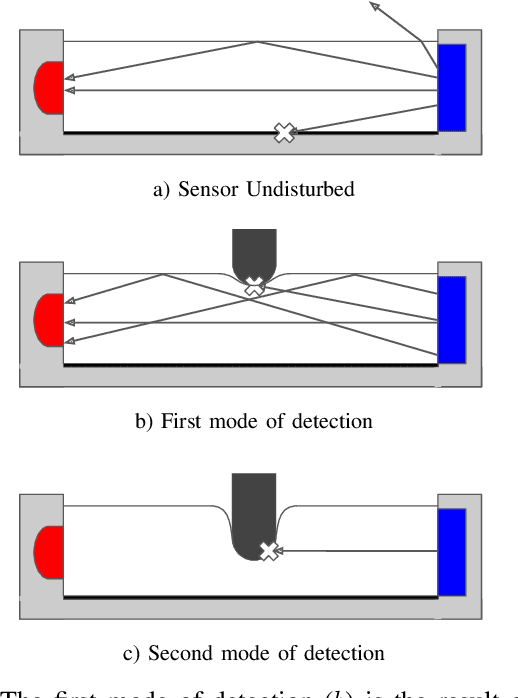
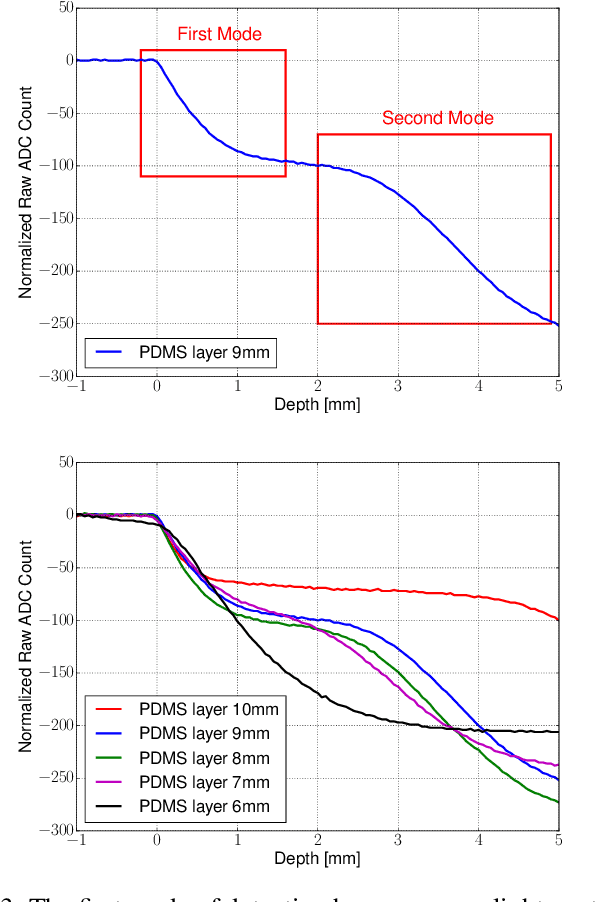
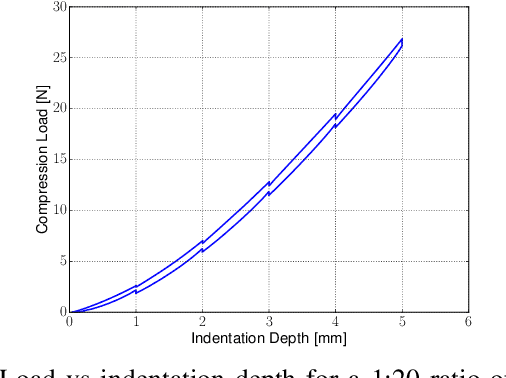
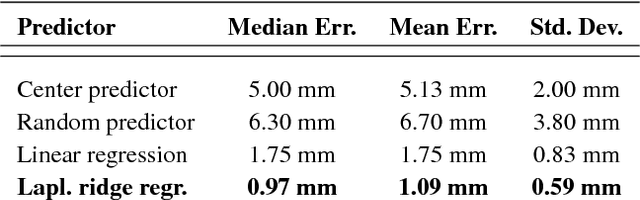
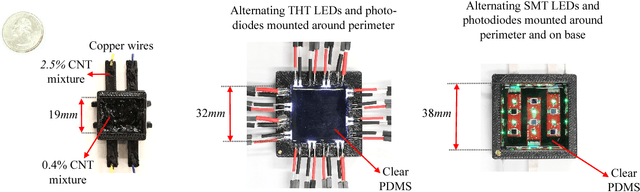
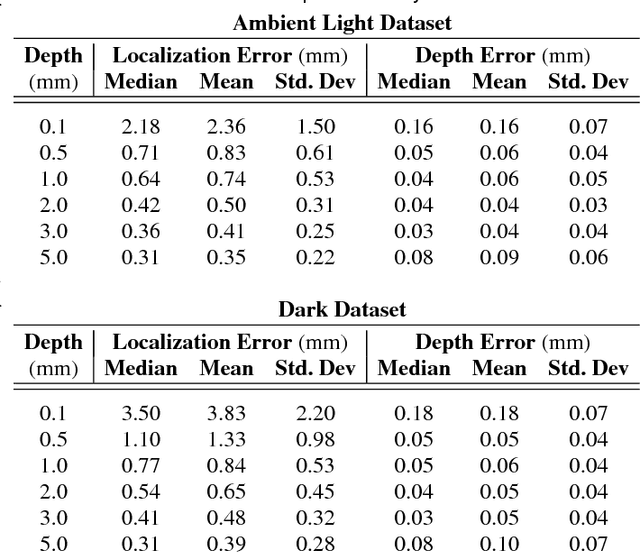
Traditional methods to achieve high localization accuracy with tactile sensors usually use a matrix of miniaturized individual sensors distributed on the area of interest. This approach usually comes at a price of increased complexity in fabrication and circuitry, and can be hard to adapt for non planar geometries. We propose to use low cost optic components mounted on the edges of the sensing area to measure how light traveling through an elastomer is affected by touch. Multiple light emitters and receivers provide us with a rich signal set that contains the necessary information to pinpoint both the location and depth of an indentation with high accuracy. We demonstrate sub-millimeter accuracy on location and depth on a 20mm by 20mm active sensing area. Our sensor provides high depth sensitivity as a result of two different modalities in how light is guided through our elastomer. This method results in a low cost, easy to manufacture sensor. We believe this approach can be adapted to cover non-planar surfaces, simplifying future integration in robot skin applications.
Contact Localization through Spatially Overlapping Piezoresistive Signals
Jan 23, 2018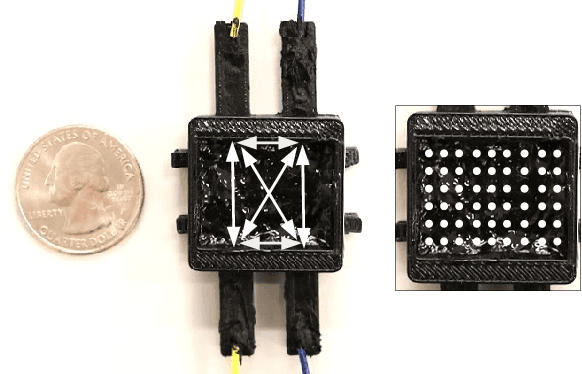
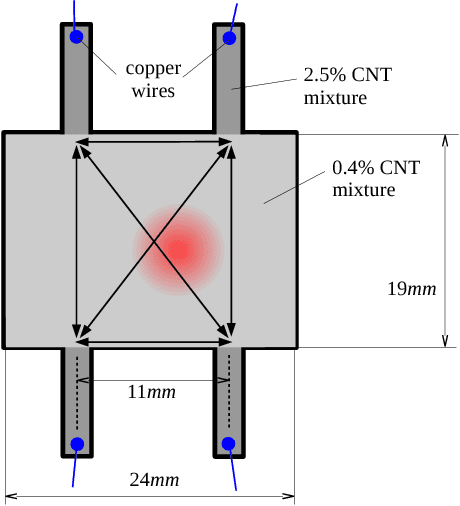
Achieving high spatial resolution in contact sensing for robotic manipulation often comes at the price of increased complexity in fabrication and integration. One traditional approach is to fabricate a large number of taxels, each delivering an individual, isolated response to a stimulus. In contrast, we propose a method where the sensor simply consists of a continuous volume of piezoresistive elastomer with a number of electrodes embedded inside. We measure piezoresistive effects between all pairs of electrodes in the set, and count on this rich signal set containing the information needed to pinpoint contact location with high accuracy using regression algorithms. In our validation experiments, we demonstrate submillimeter median accuracy in locating contact on a 10mm by 16mm sensor using only four electrodes (creating six unique pairs). In addition to extracting more information from fewer wires, this approach lends itself to simple fabrication methods and makes no assumptions about the underlying geometry, simplifying future integration on robot fingers.