 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation
Oct 30, 2025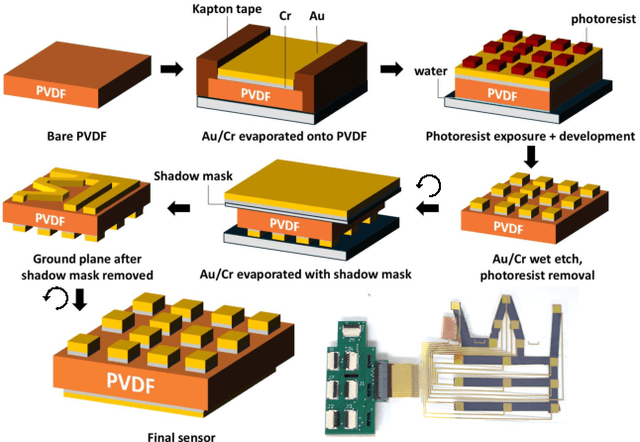
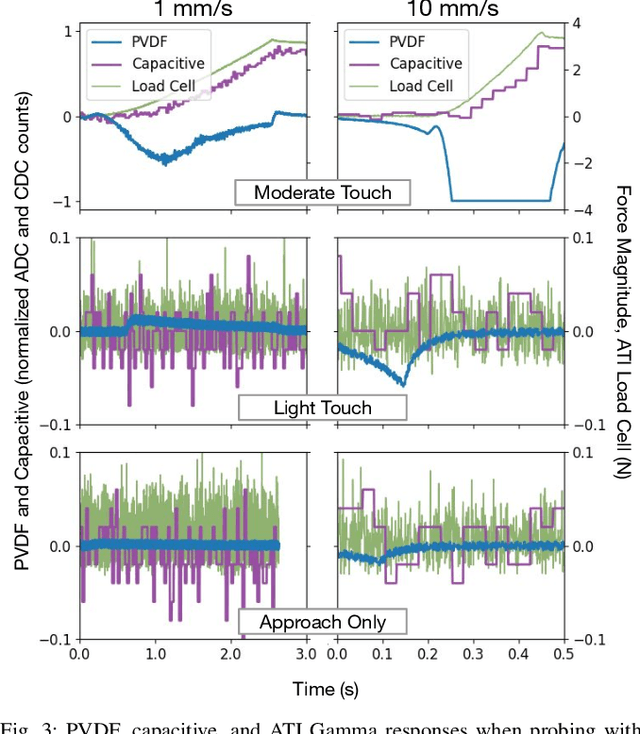
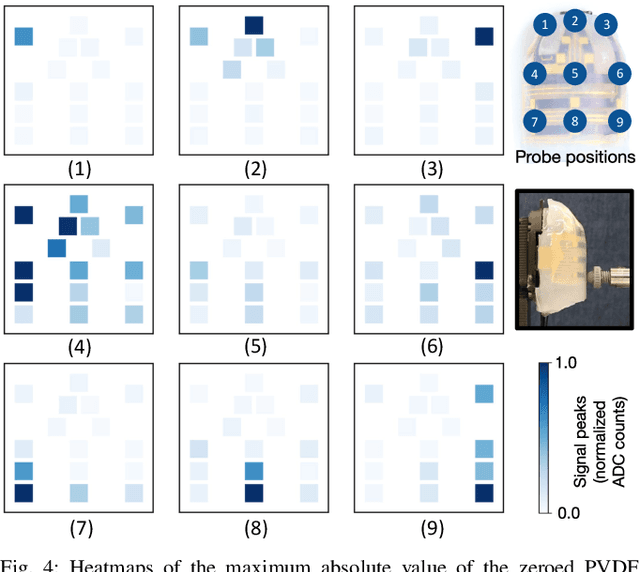
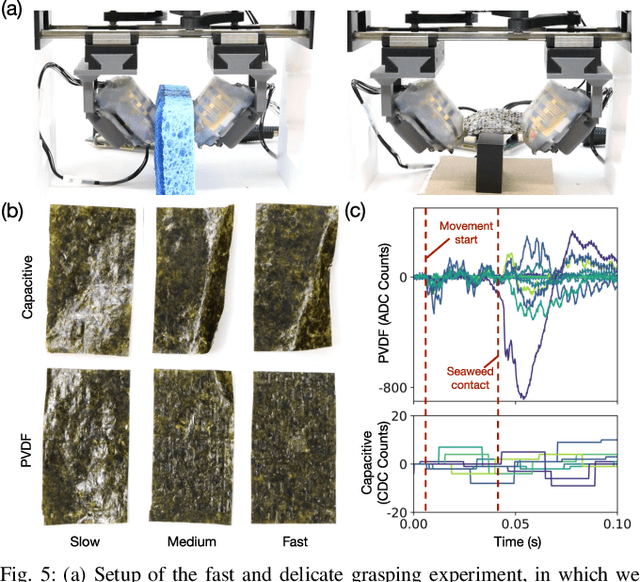
In this work, we introduce SpikeATac, a multimodal tactile finger combining a taxelized and highly sensitive dynamic response (PVDF) with a static transduction method (capacitive) for multimodal touch sensing. Named for its `spiky' response, SpikeATac's 16-taxel PVDF film sampled at 4 kHz provides fast, sensitive dynamic signals to the very onset and breaking of contact. We characterize the sensitivity of the different modalities, and show that SpikeATac provides the ability to stop quickly and delicately when grasping fragile, deformable objects. Beyond parallel grasping, we show that SpikeATac can be used in a learning-based framework to achieve new capabilities on a dexterous multifingered robot hand. We use a learning recipe that combines reinforcement learning from human feedback with tactile-based rewards to fine-tune the behavior of a policy to modulate force. Our hardware platform and learning pipeline together enable a difficult dexterous and contact-rich task that has not previously been achieved: in-hand manipulation of fragile objects. Videos are available at \href{https://roamlab.github.io/spikeatac/}{roamlab.github.io/spikeatac}.
VibeCheck: Using Active Acoustic Tactile Sensing for Contact-Rich Manipulation
Apr 22, 2025The acoustic response of an object can reveal a lot about its global state, for example its material properties or the extrinsic contacts it is making with the world. In this work, we build an active acoustic sensing gripper equipped with two piezoelectric fingers: one for generating signals, the other for receiving them. By sending an acoustic vibration from one finger to the other through an object, we gain insight into an object's acoustic properties and contact state. We use this system to classify objects, estimate grasping position, estimate poses of internal structures, and classify the types of extrinsic contacts an object is making with the environment. Using our contact type classification model, we tackle a standard long-horizon manipulation problem: peg insertion. We use a simple simulated transition model based on the performance of our sensor to train an imitation learning policy that is robust to imperfect predictions from the classifier. We finally demonstrate the policy on a UR5 robot with active acoustic sensing as the only feedback.