 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpikeATac: A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation
Oct 30, 2025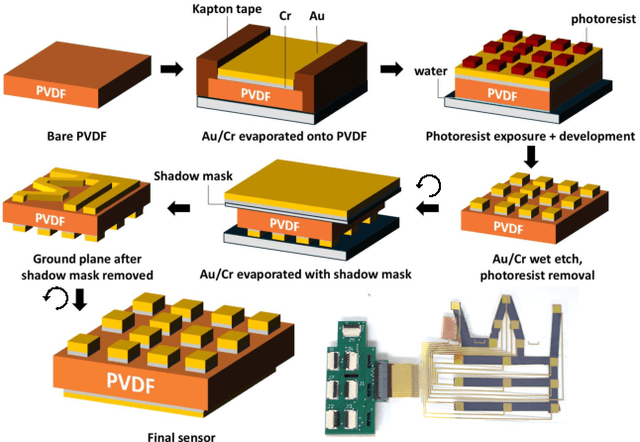
In this work, we introduce SpikeATac, a multimodal tactile finger combining a taxelized and highly sensitive dynamic response (PVDF) with a static transduction method (capacitive) for multimodal touch sensing. Named for its `spiky' response, SpikeATac's 16-taxel PVDF film sampled at 4 kHz provides fast, sensitive dynamic signals to the very onset and breaking of contact. We characterize the sensitivity of the different modalities, and show that SpikeATac provides the ability to stop quickly and delicately when grasping fragile, deformable objects. Beyond parallel grasping, we show that SpikeATac can be used in a learning-based framework to achieve new capabilities on a dexterous multifingered robot hand. We use a learning recipe that combines reinforcement learning from human feedback with tactile-based rewards to fine-tune the behavior of a policy to modulate force. Our hardware platform and learning pipeline together enable a difficult dexterous and contact-rich task that has not previously been achieved: in-hand manipulation of fragile objects. Videos are available at \href{https://roamlab.github.io/spikeatac/}{roamlab.github.io/spikeatac}.
VibeCheck: Using Active Acoustic Tactile Sensing for Contact-Rich Manipulation
Apr 22, 2025The acoustic response of an object can reveal a lot about its global state, for example its material properties or the extrinsic contacts it is making with the world. In this work, we build an active acoustic sensing gripper equipped with two piezoelectric fingers: one for generating signals, the other for receiving them. By sending an acoustic vibration from one finger to the other through an object, we gain insight into an object's acoustic properties and contact state. We use this system to classify objects, estimate grasping position, estimate poses of internal structures, and classify the types of extrinsic contacts an object is making with the environment. Using our contact type classification model, we tackle a standard long-horizon manipulation problem: peg insertion. We use a simple simulated transition model based on the performance of our sensor to train an imitation learning policy that is robust to imperfect predictions from the classifier. We finally demonstrate the policy on a UR5 robot with active acoustic sensing as the only feedback.
R$\times$R: Rapid eXploration for Reinforcement Learning via Sampling-based Reset Distributions and Imitation Pre-training
Jan 27, 2024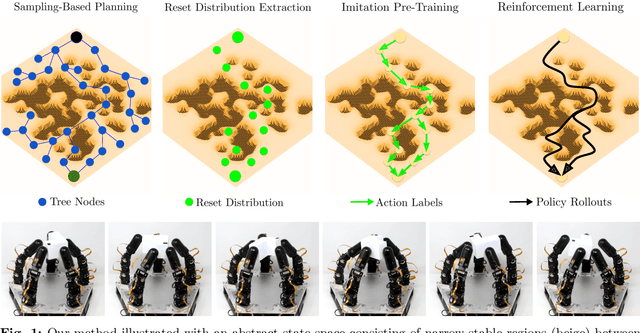

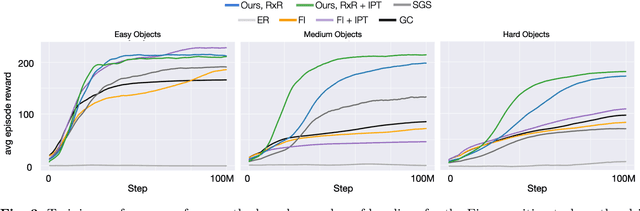
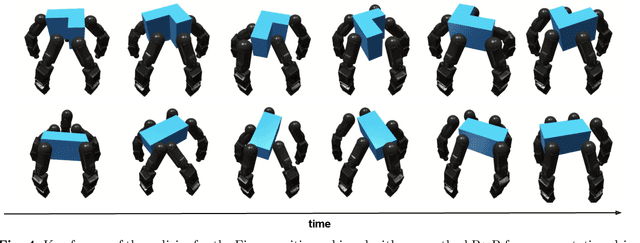
We present a method for enabling Reinforcement Learning of motor control policies for complex skills such as dexterous manipulation. We posit that a key difficulty for training such policies is the difficulty of exploring the problem state space, as the accessible and useful regions of this space form a complex structure along manifolds of the original high-dimensional state space. This work presents a method to enable and support exploration with Sampling-based Planning. We use a generally applicable non-holonomic Rapidly-exploring Random Trees algorithm and present multiple methods to use the resulting structure to bootstrap model-free Reinforcement Learning. Our method is effective at learning various challenging dexterous motor control skills of higher difficulty than previously shown. In particular, we achieve dexterous in-hand manipulation of complex objects while simultaneously securing the object without the use of passive support surfaces. These policies also transfer effectively to real robots. A number of example videos can also be found on the project website: https://sbrl.cs.columbia.edu
An Investigation of Multi-feature Extraction and Super-resolution with Fast Microphone Arrays
Sep 30, 2023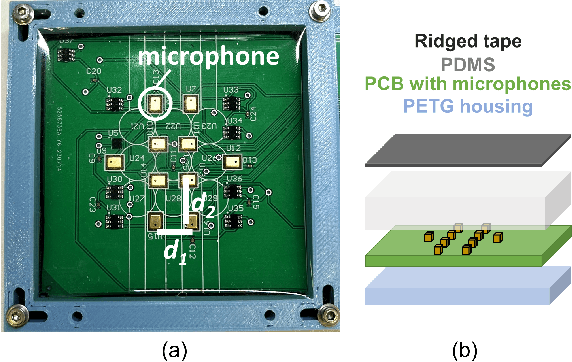
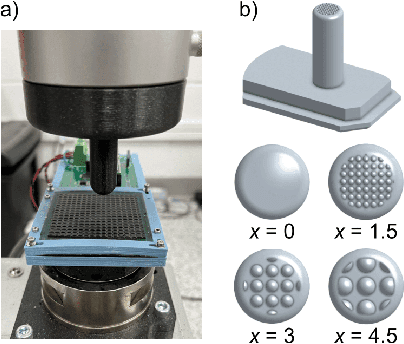
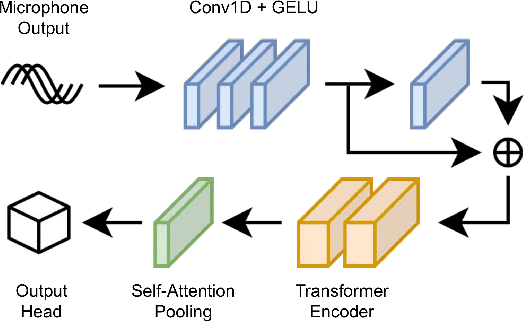

In this work, we use MEMS microphones as vibration sensors to simultaneously classify texture and estimate contact position and velocity. Vibration sensors are an important facet of both human and robotic tactile sensing, providing fast detection of contact and onset of slip. Microphones are an attractive option for implementing vibration sensing as they offer a fast response and can be sampled quickly, are affordable, and occupy a very small footprint. Our prototype sensor uses only a sparse array of distributed MEMS microphones (8-9 mm spacing) embedded under an elastomer. We use transformer-based architectures for data analysis, taking advantage of the microphones' high sampling rate to run our models on time-series data as opposed to individual snapshots. This approach allows us to obtain 77.3% average accuracy on 4-class texture classification (84.2% when excluding the slowest drag velocity), 1.5 mm median error on contact localization, and 4.5 mm/s median error on contact velocity. We show that the learned texture and localization models are robust to varying velocity and generalize to unseen velocities. We also report that our sensor provides fast contact detection, an important advantage of fast transducers. This investigation illustrates the capabilities one can achieve with a MEMS microphone array alone, leaving valuable sensor real estate available for integration with complementary tactile sensing modalities.
Sampling-based Exploration for Reinforcement Learning of Dexterous Manipulation
Mar 11, 2023



In this paper, we present a novel method for achieving dexterous manipulation of complex objects, while simultaneously securing the object without the use of passive support surfaces. We posit that a key difficulty for training such policies in a Reinforcement Learning framework is the difficulty of exploring the problem state space, as the accessible regions of this space form a complex structure along manifolds of a high-dimensional space. To address this challenge, we use two versions of the non-holonomic Rapidly-Exploring Random Trees algorithm; one version is more general, but requires explicit use of the environment's transition function, while the second version uses manipulation-specific kinematic constraints to attain better sample efficiency. In both cases, we use states found via sampling-based exploration to generate reset distributions that enable training control policies under full dynamic constraints via model-free Reinforcement Learning. We show that these policies are effective at manipulation problems of higher difficulty than previously shown, and also transfer effectively to real robots. Videos of the real-hand demonstrations can be found on the project website: https://sbrl.cs.columbia.edu/