 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrain Robots in a JIF: Joint Inverse and Forward Dynamics with Human and Robot Demonstrations
Mar 15, 2025Pre-training on large datasets of robot demonstrations is a powerful technique for learning diverse manipulation skills but is often limited by the high cost and complexity of collecting robot-centric data, especially for tasks requiring tactile feedback. This work addresses these challenges by introducing a novel method for pre-training with multi-modal human demonstrations. Our approach jointly learns inverse and forward dynamics to extract latent state representations, towards learning manipulation specific representations. This enables efficient fine-tuning with only a small number of robot demonstrations, significantly improving data efficiency. Furthermore, our method allows for the use of multi-modal data, such as combination of vision and touch for manipulation. By leveraging latent dynamics modeling and tactile sensing, this approach paves the way for scalable robot manipulation learning based on human demonstrations.
R$\times$R: Rapid eXploration for Reinforcement Learning via Sampling-based Reset Distributions and Imitation Pre-training
Jan 27, 2024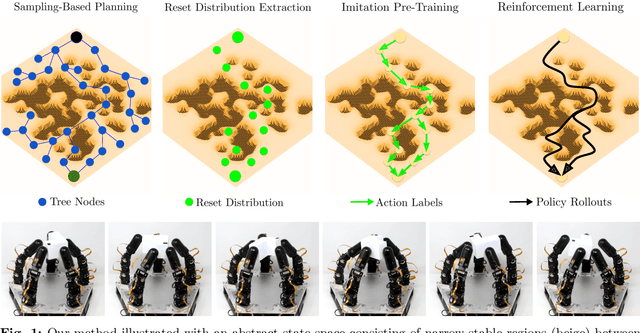

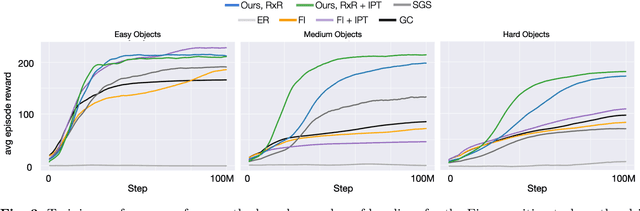
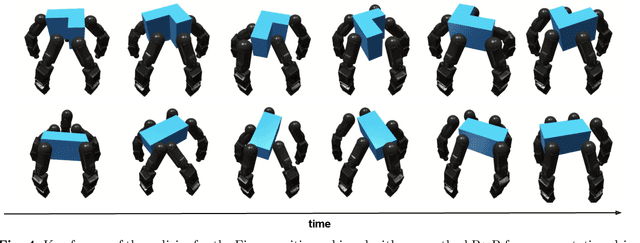
We present a method for enabling Reinforcement Learning of motor control policies for complex skills such as dexterous manipulation. We posit that a key difficulty for training such policies is the difficulty of exploring the problem state space, as the accessible and useful regions of this space form a complex structure along manifolds of the original high-dimensional state space. This work presents a method to enable and support exploration with Sampling-based Planning. We use a generally applicable non-holonomic Rapidly-exploring Random Trees algorithm and present multiple methods to use the resulting structure to bootstrap model-free Reinforcement Learning. Our method is effective at learning various challenging dexterous motor control skills of higher difficulty than previously shown. In particular, we achieve dexterous in-hand manipulation of complex objects while simultaneously securing the object without the use of passive support surfaces. These policies also transfer effectively to real robots. A number of example videos can also be found on the project website: https://sbrl.cs.columbia.edu
Sampling-based Exploration for Reinforcement Learning of Dexterous Manipulation
Mar 11, 2023



In this paper, we present a novel method for achieving dexterous manipulation of complex objects, while simultaneously securing the object without the use of passive support surfaces. We posit that a key difficulty for training such policies in a Reinforcement Learning framework is the difficulty of exploring the problem state space, as the accessible regions of this space form a complex structure along manifolds of a high-dimensional space. To address this challenge, we use two versions of the non-holonomic Rapidly-Exploring Random Trees algorithm; one version is more general, but requires explicit use of the environment's transition function, while the second version uses manipulation-specific kinematic constraints to attain better sample efficiency. In both cases, we use states found via sampling-based exploration to generate reset distributions that enable training control policies under full dynamic constraints via model-free Reinforcement Learning. We show that these policies are effective at manipulation problems of higher difficulty than previously shown, and also transfer effectively to real robots. Videos of the real-hand demonstrations can be found on the project website: https://sbrl.cs.columbia.edu/
Value Guided Exploration with Sub-optimal Controllers for Learning Dexterous Manipulation
Mar 06, 2023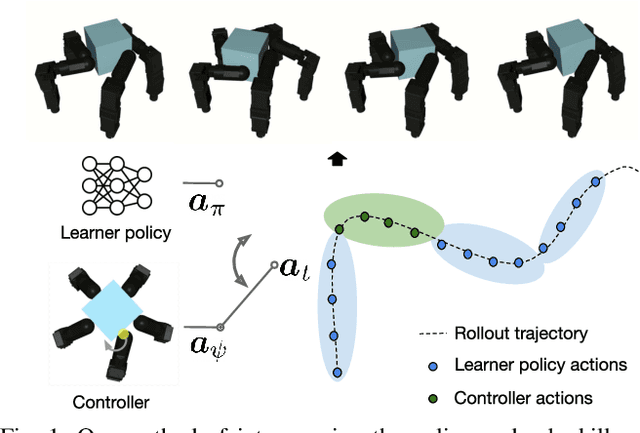
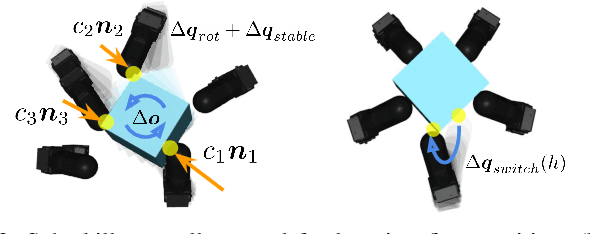
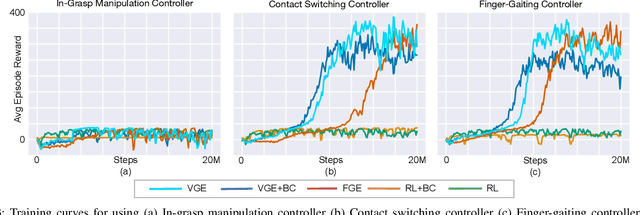
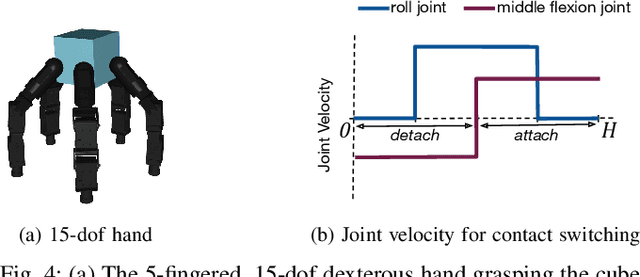
Recently, reinforcement learning has allowed dexterous manipulation skills with increasing complexity. Nonetheless, learning these skills in simulation still exhibits poor sample-efficiency which stems from the fact these skills are learned from scratch without the benefit of any domain expertise. In this work, we aim to improve the sample-efficiency of learning dexterous in-hand manipulation skills using sub-optimal controllers available via domain knowledge. Our framework optimally queries the sub-optimal controllers and guides exploration toward state-space relevant to the task thereby demonstrating improved sample complexity. We show that our framework allows learning from highly sub-optimal controllers and we are the first to demonstrate learning hard-to-explore finger-gaiting in-hand manipulation skills without the use of an exploratory reset distribution.
On the Feasibility of Learning Finger-gaiting In-hand Manipulation with Intrinsic Sensing
Sep 26, 2021



Finger-gaiting manipulation is an important skill to achieve large-angle in-hand re-orientation of objects. However, achieving these gaits with arbitrary orientations of the hand is challenging due to the unstable nature of the task. In this work, we use model-free reinforcement learning (RL) to learn finger-gaiting only via precision grasps and demonstrate finger-gaiting for rotation about an axis purely using on-board proprioceptive and tactile feedback. To tackle the inherent instability of precision grasping, we propose the use of initial state distributions that enable effective exploration of the state space. Our method can learn finger-gaiting with significantly improved sample complexity than the state-of-the-art. The policies we obtain are robust and also transfer to novel objects.
Automatic Snake Gait Generation Using Model Predictive Control
Sep 28, 2019


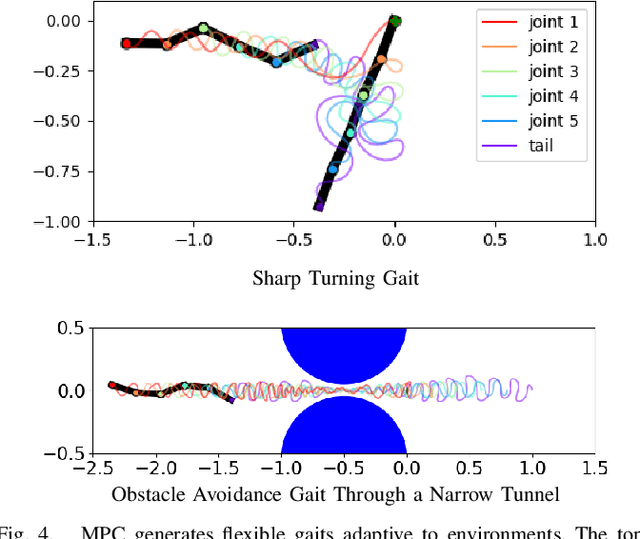
In this paper, we propose a method for generating undulatory gaits for snake robots. Instead of starting from a pre-defined movement pattern such as a serpenoid curve, we use a Model Predictive Control approach to automatically generate effective locomotion gaits via trajectory optimization. An important advantage of this approach is that the resulting gaits are automatically adapted to the environment that is being modeled as part of the snake dynamics. To illustrate this, we use a novel model for anisotropic dry friction, along with existing models for viscous friction and fluid dynamic effects such as drag and added mass. For each of these models, gaits generated without any change in the method or its parameters are as efficient as Pareto-optimal serpenoid gaits tuned individually for each environment. Furthermore, the proposed method can also produce more complex or irregular gaits, e.g. for obstacle avoidance or executing sharp turns.