 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Beyond the Horizon: Efficient Sampling-based MPC with Neural Control Barrier Functions
Feb 20, 2025A common problem when using model predictive control (MPC) in practice is the satisfaction of safety specifications beyond the prediction horizon. While theoretical works have shown that safety can be guaranteed by enforcing a suitable terminal set constraint or a sufficiently long prediction horizon, these techniques are difficult to apply and thus are rarely used by practitioners, especially in the case of general nonlinear dynamics. To solve this problem, we impose a tradeoff between exact recursive feasibility, computational tractability, and applicability to ''black-box'' dynamics by learning an approximate discrete-time control barrier function and incorporating it into a variational inference MPC (VIMPC), a sampling-based MPC paradigm. To handle the resulting state constraints, we further propose a new sampling strategy that greatly reduces the variance of the estimated optimal control, improving the sample efficiency, and enabling real-time planning on a CPU. The resulting Neural Shield-VIMPC (NS-VIMPC) controller yields substantial safety improvements compared to existing sampling-based MPC controllers, even under badly designed cost functions. We validate our approach in both simulation and real-world hardware experiments.
RPCBF: Constructing Safety Filters Robust to Model Error and Disturbances via Policy Control Barrier Functions
Oct 15, 2024Control Barrier Functions (CBFs) have proven to be an effective tool for performing safe control synthesis for nonlinear systems. However, guaranteeing safety in the presence of disturbances and input constraints for high relative degree systems is a difficult problem. In this work, we propose the Robust Policy CBF (RPCBF), a practical method of constructing CBF approximations that is easy to implement and robust to disturbances via the estimation of a value function. We demonstrate the effectiveness of our method in simulation on a variety of high relative degree input-constrained systems. Finally, we demonstrate the benefits of RPCBF in compensating for model errors on a hardware quadcopter platform by treating the model errors as disturbances. The project page can be found at https://oswinso.xyz/rpcbf.
Shield Model Predictive Path Integral: A Computationally Efficient Robust MPC Approach Using Control Barrier Functions
Feb 23, 2023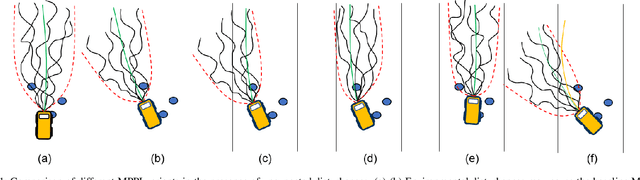
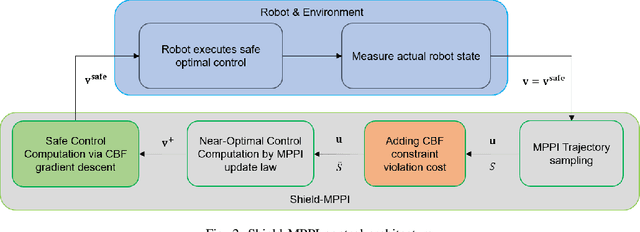
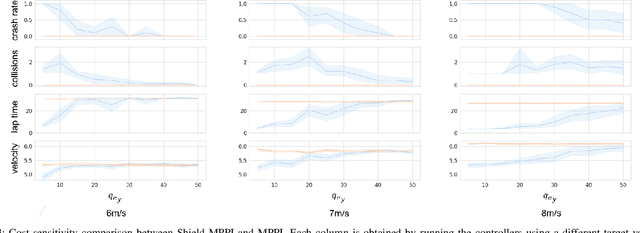
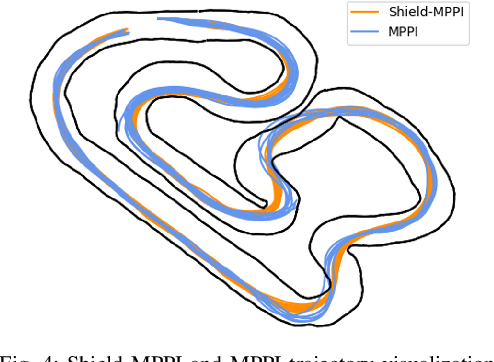
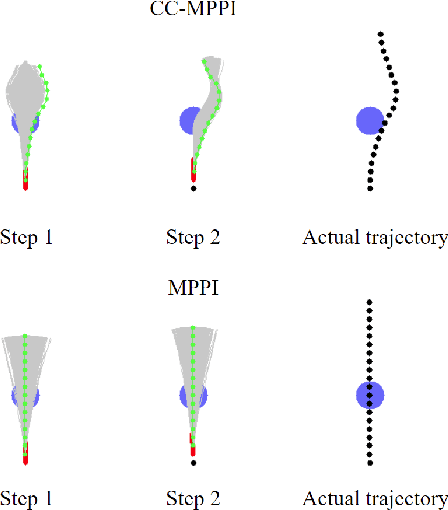
Model Predictive Path Integral (MPPI) control is a type of sampling-based model predictive control that simulates thousands of trajectories and uses these trajectories to synthesize optimal controls on-the-fly. In practice, however, MPPI encounters problems limiting its application. For instance, it has been observed that MPPI tends to make poor decisions if unmodeled dynamics or environmental disturbances exist, preventing its use in safety-critical applications. Moreover, the multi-threaded simulations used by MPPI require significant onboard computational resources, making the algorithm inaccessible to robots without modern GPUs. To alleviate these issues, we propose a novel (Shield-MPPI) algorithm that provides robustness against unpredicted disturbances and achieves real-time planning using a much smaller number of parallel simulations on regular CPUs. The novel Shield-MPPI algorithm is tested on an aggressive autonomous racing platform both in simulation and using experiments. The results show that the proposed controller greatly reduces the number of constraint violations compared to state-of-the-art robust MPPI variants and stochastic MPC methods.
Risk-Aware Model Predictive Path Integral Control Using Conditional Value-at-Risk
Sep 26, 2022
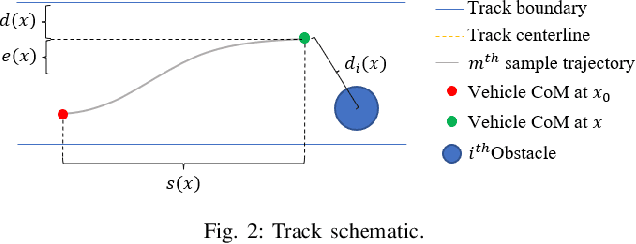


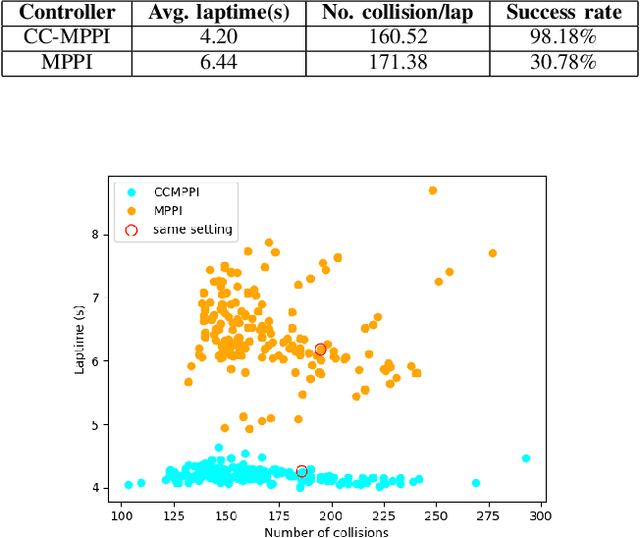
In this paper, we present a novel Model Predictive Control method for autonomous robots subject to arbitrary forms of uncertainty. The proposed Risk-Aware Model Predictive Path Integral (RA-MPPI) control utilizes the Conditional Value-at-Risk (CVaR) measure to generate optimal control actions for safety-critical robotic applications. Different from most existing Stochastic MPCs and CVaR optimization methods that linearize the original dynamics and formulate control tasks as convex programs, the proposed method directly uses the original dynamics without restricting the form of the cost functions or the noise. We apply the novel RA-MPPI controller to an autonomous vehicle to perform aggressive driving maneuvers in cluttered environments. Our simulations and experiments show that the proposed RA-MPPI controller can achieve about the same lap time with significantly fewer collisions compared to the baseline MPPI controller. The proposed controller performs on-line computation at an update frequency of up to 80Hz, utilizing modern Graphics Processing Units (GPUs) to multi-thread the generation of trajectories as well as the CVaR values.
Improving Model Predictive Path Integral using Covariance Steering
Sep 24, 2021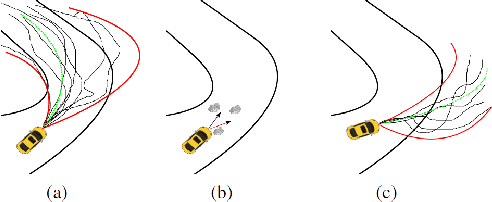

This paper presents a novel control approach for autonomous systems operating under uncertainty. We combine Model Predictive Path Integral (MPPI) control with Covariance Steering (CS) theory to obtain a robust controller for general nonlinear systems. The proposed Covariance-Controlled Model Predictive Path Integral (CC-MPPI) controller addresses the performance degradation observed in some MPPI implementations owing to unexpected disturbances and uncertainties. Namely, in cases where the environment changes too fast or the simulated dynamics during the MPPI rollouts do not capture the noise and uncertainty in the actual dynamics, the baseline MPPI implementation may lead to divergence. The proposed CC-MPPI controller avoids divergence by controlling the dispersion of the rollout trajectories at the end of the prediction horizon. Furthermore, the CC-MPPI has adjustable trajectory sampling distributions that can be changed according to the environment to achieve efficient sampling. Numerical examples using a ground vehicle navigating in challenging environments demonstrate the proposed approach.
Automatic Snake Gait Generation Using Model Predictive Control
Sep 28, 2019


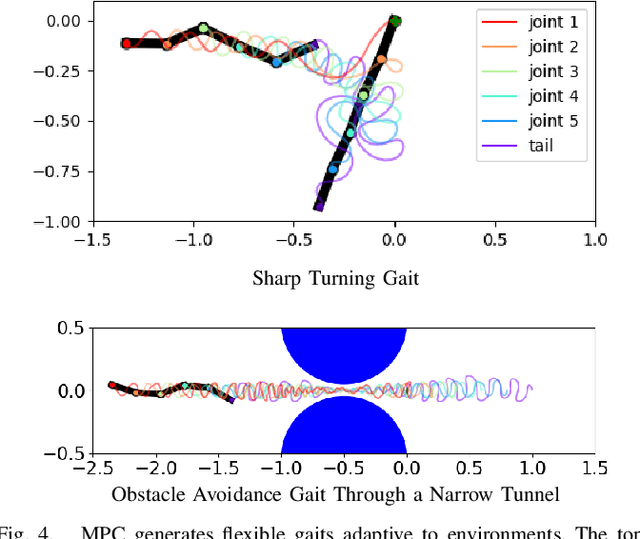
In this paper, we propose a method for generating undulatory gaits for snake robots. Instead of starting from a pre-defined movement pattern such as a serpenoid curve, we use a Model Predictive Control approach to automatically generate effective locomotion gaits via trajectory optimization. An important advantage of this approach is that the resulting gaits are automatically adapted to the environment that is being modeled as part of the snake dynamics. To illustrate this, we use a novel model for anisotropic dry friction, along with existing models for viscous friction and fluid dynamic effects such as drag and added mass. For each of these models, gaits generated without any change in the method or its parameters are as efficient as Pareto-optimal serpenoid gaits tuned individually for each environment. Furthermore, the proposed method can also produce more complex or irregular gaits, e.g. for obstacle avoidance or executing sharp turns.