 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRPCBF: Constructing Safety Filters Robust to Model Error and Disturbances via Policy Control Barrier Functions
Oct 15, 2024Control Barrier Functions (CBFs) have proven to be an effective tool for performing safe control synthesis for nonlinear systems. However, guaranteeing safety in the presence of disturbances and input constraints for high relative degree systems is a difficult problem. In this work, we propose the Robust Policy CBF (RPCBF), a practical method of constructing CBF approximations that is easy to implement and robust to disturbances via the estimation of a value function. We demonstrate the effectiveness of our method in simulation on a variety of high relative degree input-constrained systems. Finally, we demonstrate the benefits of RPCBF in compensating for model errors on a hardware quadcopter platform by treating the model errors as disturbances. The project page can be found at https://oswinso.xyz/rpcbf.
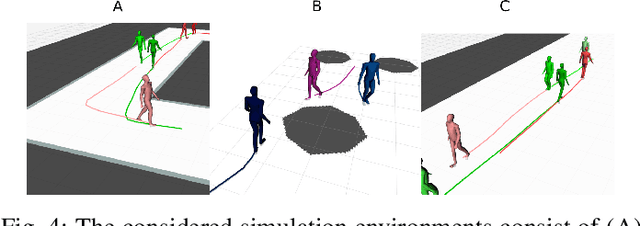
SHINE: Social Homology Identification for Navigation in Crowded Environments
Apr 25, 2024Navigating mobile robots in social environments remains a challenging task due to the intricacies of human-robot interactions. Most of the motion planners designed for crowded and dynamic environments focus on choosing the best velocity to reach the goal while avoiding collisions, but do not explicitly consider the high-level navigation behavior (avoiding through the left or right side, letting others pass or passing before others, etc.). In this work, we present a novel motion planner that incorporates topology distinct paths representing diverse navigation strategies around humans. The planner selects the topology class that imitates human behavior the best using a deep neural network model trained on real-world human motion data, ensuring socially intelligent and contextually aware navigation. Our system refines the chosen path through an optimization-based local planner in real time, ensuring seamless adherence to desired social behaviors. In this way, we decouple perception and local planning from the decision-making process. We evaluate the prediction accuracy of the network with real-world data. In addition, we assess the navigation capabilities in both simulation and a real-world platform, comparing it with other state-of-the-art planners. We demonstrate that our planner exhibits socially desirable behaviors and shows a smooth and remarkable performance.
Current-Based Impedance Control for Interacting with Mobile Manipulators
Mar 19, 2024As robots shift from industrial to human-centered spaces, adopting mobile manipulators, which expand workspace capabilities, becomes crucial. In these settings, seamless interaction with humans necessitates compliant control. Two common methods for safe interaction, admittance, and impedance control, require force or torque sensors, often absent in lower-cost or lightweight robots. This paper presents an adaption of impedance control that can be used on current-controlled robots without the use of force or torque sensors and its application for compliant control of a mobile manipulator. A calibration method is designed that enables estimation of the actuators' current/torque ratios and frictions, used by the adapted impedance controller, and that can handle model errors. The calibration method and the performance of the designed controller are experimentally validated using the Kinova GEN3 Lite arm. Results show that the calibration method is consistent and that the designed controller for the arm is compliant while also being able to track targets with five-millimeter precision when no interaction is present. Additionally, this paper presents two operational modes for interacting with the mobile manipulator: one for guiding the robot around the workspace through interacting with the arm and another for executing a tracking task, both maintaining compliance to external forces. These operational modes were tested in real-world experiments, affirming their practical applicability and effectiveness.
Multi-Robot Local Motion Planning Using Dynamic Optimization Fabrics
Oct 19, 2023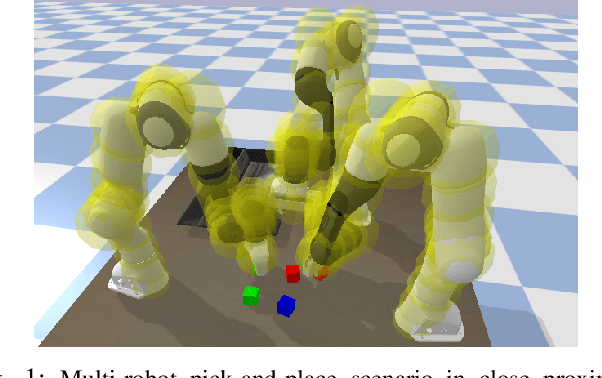



In this paper, we address the problem of real-time motion planning for multiple robotic manipulators that operate in close proximity. We build upon the concept of dynamic fabrics and extend them to multi-robot systems, referred to as Multi-Robot Dynamic Fabrics (MRDF). This geometric method enables a very high planning frequency for high-dimensional systems at the expense of being reactive and prone to deadlocks. To detect and resolve deadlocks, we propose Rollout Fabrics where MRDF are forward simulated in a decentralized manner. We validate the methods in simulated close-proximity pick-and-place scenarios with multiple manipulators, showing high success rates and real-time performance.
Improving Pedestrian Prediction Models with Self-Supervised Continual Learning
Feb 15, 2022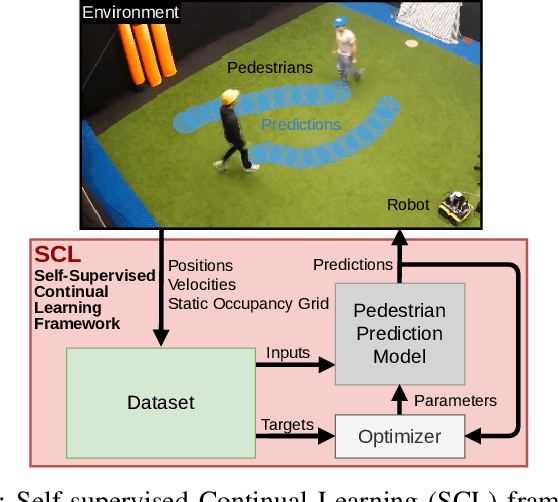
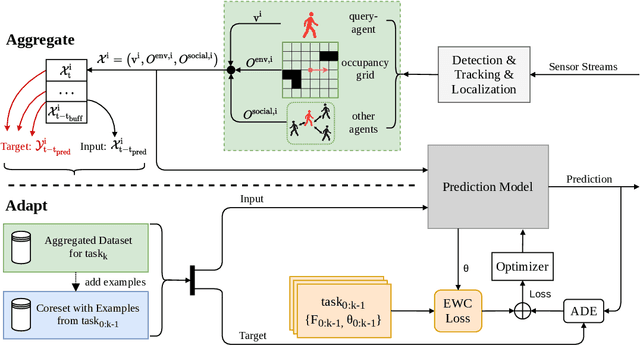
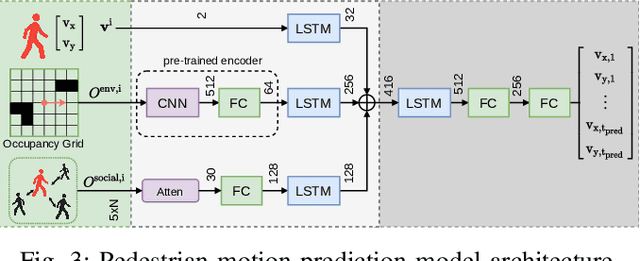
Autonomous mobile robots require accurate human motion predictions to safely and efficiently navigate among pedestrians, whose behavior may adapt to environmental changes. This paper introduces a self-supervised continual learning framework to improve data-driven pedestrian prediction models online across various scenarios continuously. In particular, we exploit online streams of pedestrian data, commonly available from the robot's detection and tracking pipeline, to refine the prediction model and its performance in unseen scenarios. To avoid the forgetting of previously learned concepts, a problem known as catastrophic forgetting, our framework includes a regularization loss to penalize changes of model parameters that are important for previous scenarios and retrains on a set of previous examples to retain past knowledge. Experimental results on real and simulation data show that our approach can improve prediction performance in unseen scenarios while retaining knowledge from seen scenarios when compared to naively training the prediction model online.