 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Pedestrian Prediction Models with Self-Supervised Continual Learning
Paper and Code
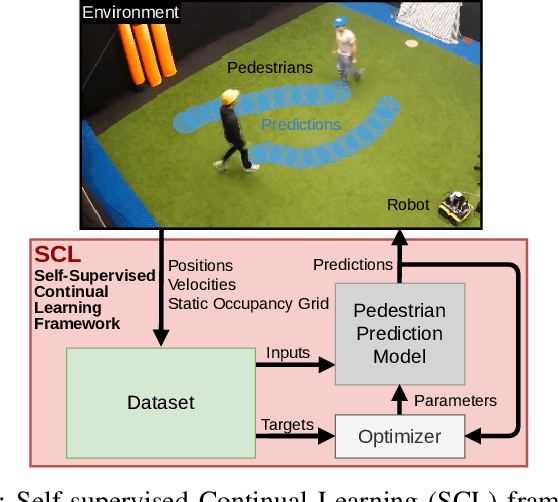
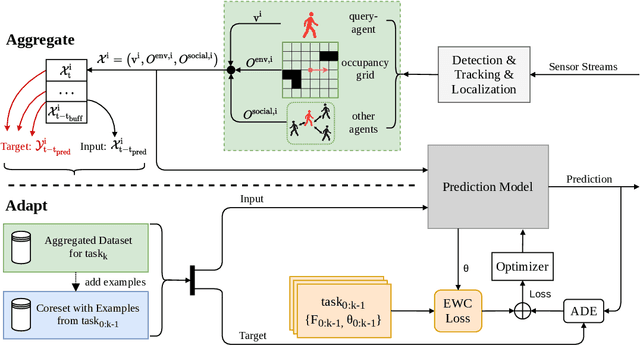
Autonomous mobile robots require accurate human motion predictions to safely and efficiently navigate among pedestrians, whose behavior may adapt to environmental changes. This paper introduces a self-supervised continual learning framework to improve data-driven pedestrian prediction models online across various scenarios continuously. In particular, we exploit online streams of pedestrian data, commonly available from the robot's detection and tracking pipeline, to refine the prediction model and its performance in unseen scenarios. To avoid the forgetting of previously learned concepts, a problem known as catastrophic forgetting, our framework includes a regularization loss to penalize changes of model parameters that are important for previous scenarios and retrains on a set of previous examples to retain past knowledge. Experimental results on real and simulation data show that our approach can improve prediction performance in unseen scenarios while retaining knowledge from seen scenarios when compared to naively training the prediction model online.