 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMUKCa: Accurate and Affordable Cobot Calibration Without External Measurement Devices
Mar 16, 2025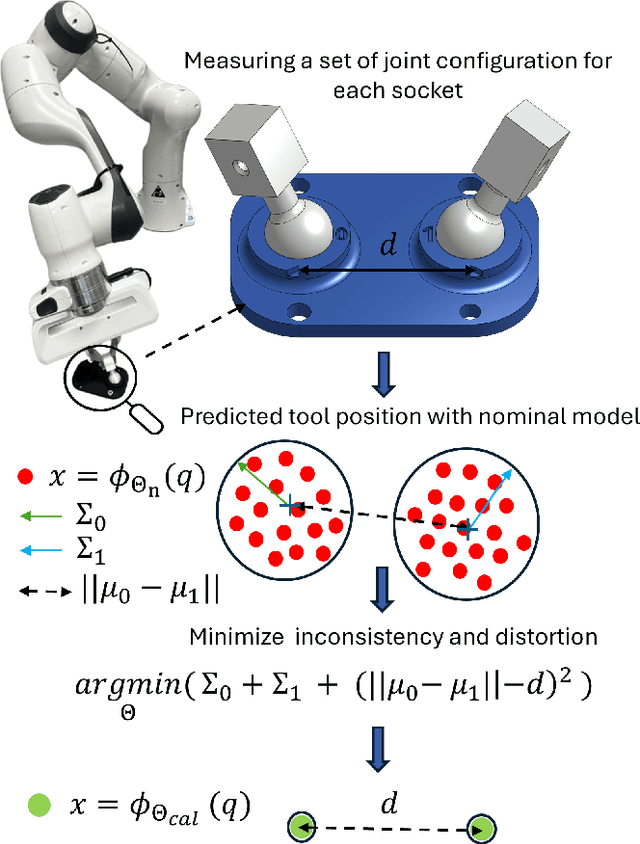
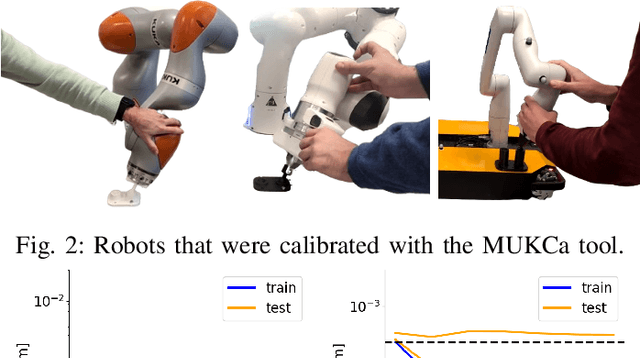
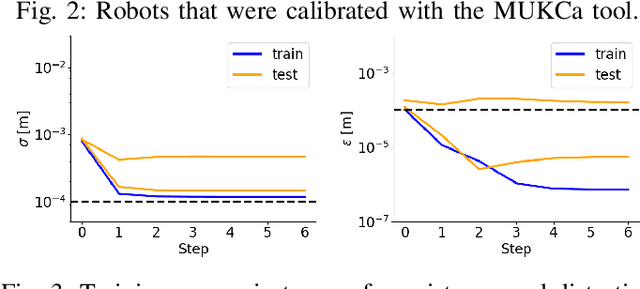
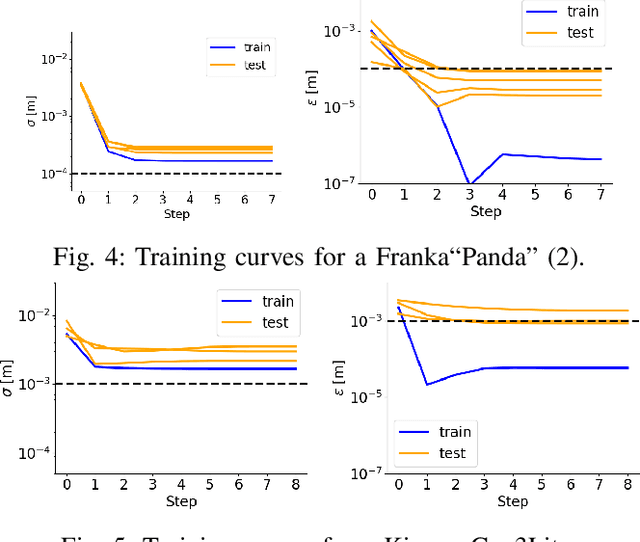
To increase the reliability of collaborative robots in performing daily tasks, we require them to be accurate and not only repeatable. However, having a calibrated kinematics model is regrettably a luxury, as available calibration tools are usually more expensive than the robots themselves. With this work, we aim to contribute to the democratization of cobots calibration by providing an inexpensive yet highly effective alternative to existing tools. The proposed minimalist calibration routine relies on a 3D-printable tool as the only physical aid to the calibration process. This two-socket spherical-joint tool kinematically constrains the robot at the end effector while collecting the training set. An optimization routine updates the nominal model to ensure a consistent prediction for each socket and the undistorted mean distance between them. We validated the algorithm on three robotic platforms: Franka, Kuka, and Kinova Cobots. The calibrated models reduce the mean absolute error from the order of 10 mm to 0.2 mm for both Franka and Kuka robots. We provide two additional experimental campaigns with the Franka Robot to render the improvements more tangible. First, we implement Cartesian control with and without the calibrated model and use it to perform a standard peg-in-the-hole task with a tolerance of 0.4 mm between the peg and the hole. Second, we perform a repeated drawing task combining Cartesian control with learning from demonstration. Both tasks consistently failed when the model was not calibrated, while they consistently succeeded after calibration.
Multi-Robot Local Motion Planning Using Dynamic Optimization Fabrics
Oct 19, 2023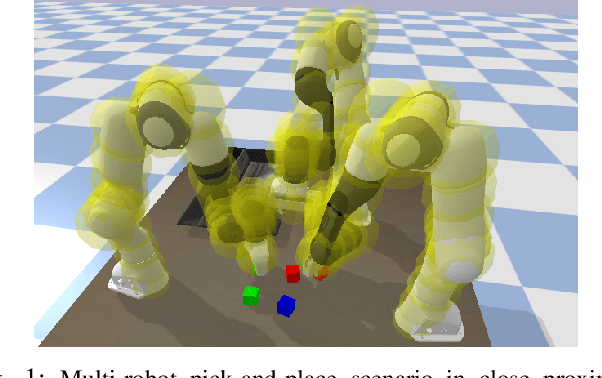



In this paper, we address the problem of real-time motion planning for multiple robotic manipulators that operate in close proximity. We build upon the concept of dynamic fabrics and extend them to multi-robot systems, referred to as Multi-Robot Dynamic Fabrics (MRDF). This geometric method enables a very high planning frequency for high-dimensional systems at the expense of being reactive and prone to deadlocks. To detect and resolve deadlocks, we propose Rollout Fabrics where MRDF are forward simulated in a decentralized manner. We validate the methods in simulated close-proximity pick-and-place scenarios with multiple manipulators, showing high success rates and real-time performance.
Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations
Jul 18, 2023We present a method for sampling-based model predictive control that makes use of a generic physics simulator as the dynamical model. In particular, we propose a Model Predictive Path Integral controller (MPPI), that uses the GPU-parallelizable IsaacGym simulator to compute the forward dynamics of a problem. By doing so, we eliminate the need for manual encoding of robot dynamics and interactions among objects and allow one to effortlessly solve complex navigation and contact-rich tasks. Since no explicit dynamic modeling is required, the method is easily extendable to different objects and robots. We demonstrate the effectiveness of this method in several simulated and real-world settings, among which mobile navigation with collision avoidance, non-prehensile manipulation, and whole-body control for high-dimensional configuration spaces. This method is a powerful and accessible tool to solve a large variety of contact-rich motion planning tasks.
Autotuning Symbolic Optimization Fabrics for Trajectory Generation
Feb 27, 2023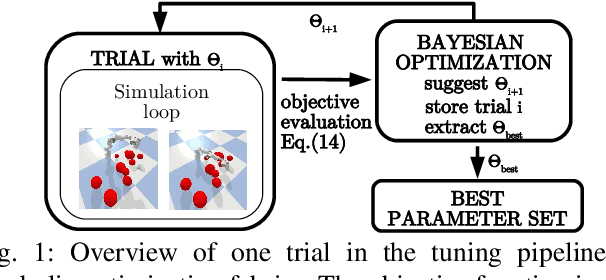
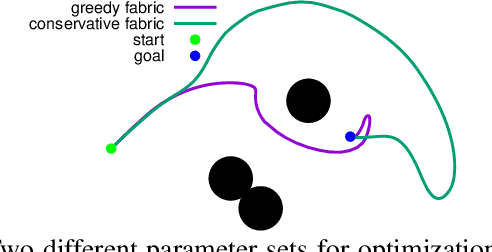
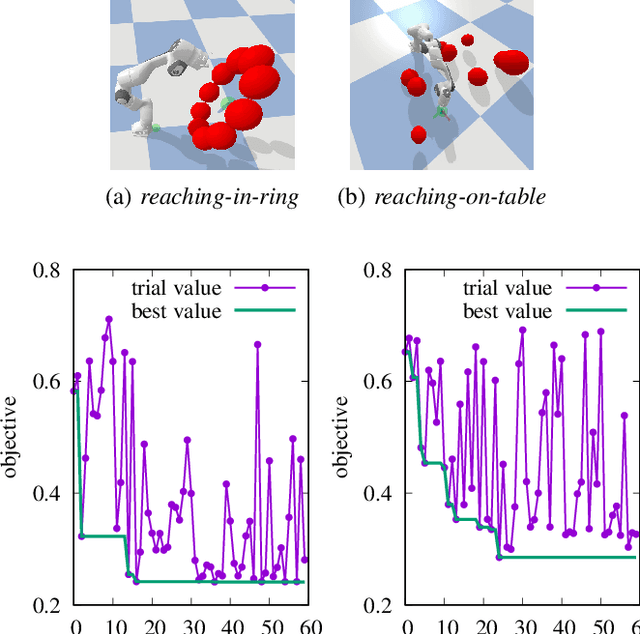
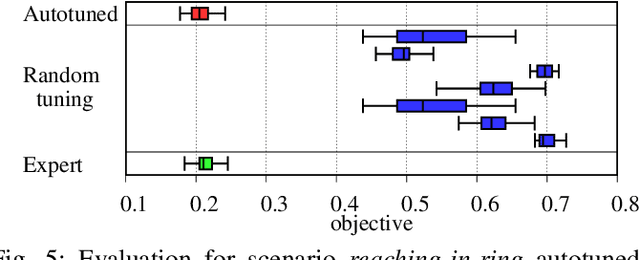
In this paper, we present an automated parameter optimization method for trajectory generation. We formulate parameter optimization as a constrained optimization problem that can be effectively solved using Bayesian optimization. While the approach is generic to any trajectory generation method, we showcase it using optimization fabrics. Optimization fabrics are a geometric trajectory generation method based on non-Riemannian geometry. By symbolically pre-solving the structure of the tree of fabrics, we obtain a parameterized trajectory generator, called symbolic fabrics. We show that autotuned symbolic fabrics reach expert-level performance in a few trials. Additionally, we show that tuning transfers across different robots, motion planning problems and between simulation and real world. Finally, we qualitatively showcase that the framework could be used for coupled mobile manipulation.
Local Planner Bench: Benchmarking for Local Motion Planning
Oct 12, 2022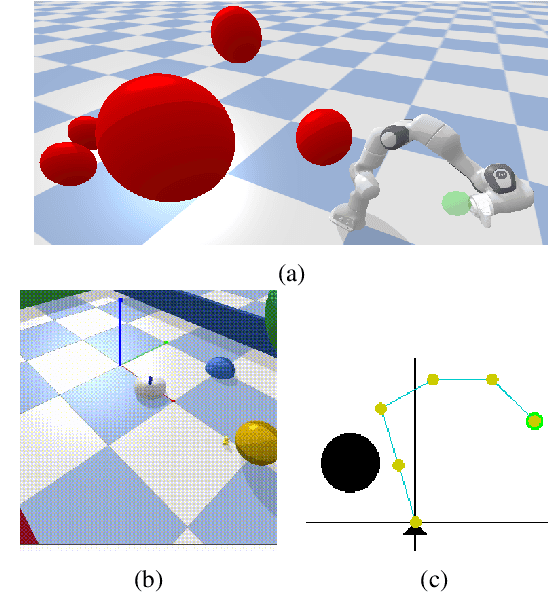
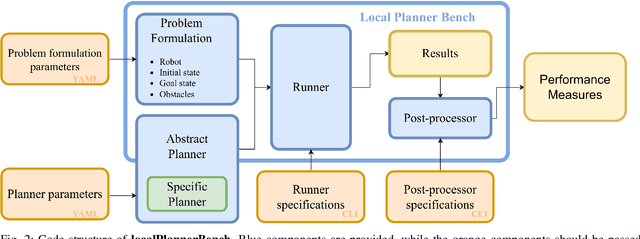
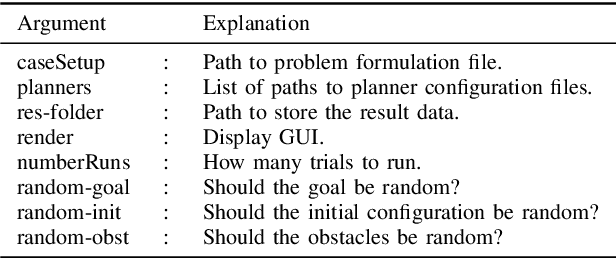
Local motion planning is a heavily researched topic in the field of robotics with many promising algorithms being published every year. However, it is difficult and time-consuming to compare different methods in the field. In this paper, we present localPlannerBench, a new benchmarking suite that allows quick and seamless comparison between local motion planning algorithms. The key focus of the project lies in the extensibility of the environment and the simulation cases. Out-of-the-box, localPlannerBench already supports many simulation cases ranging from a simple 2D point mass to full-fledged 3D 7DoF manipulators, and it is straightforward to add your own custom robot using a URDF file. A post-processor is built-in that can be extended with custom metrics and plots. To integrate your own motion planner, simply create a wrapper that derives from the provided base class. Ultimately we aim to improve the reproducibility of local motion planning algorithms and encourage standardized open-source comparison.
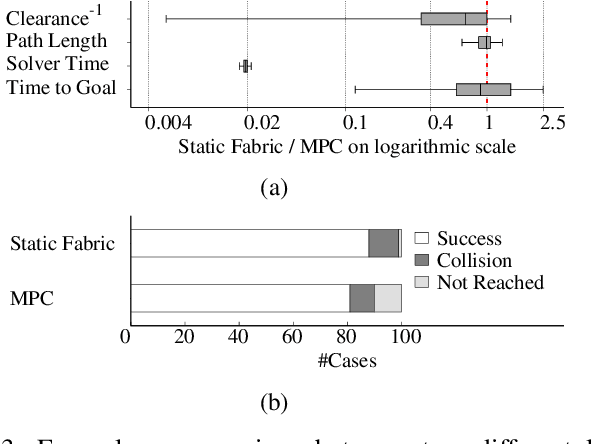
Dynamic Optimization Fabrics for Motion Generation
May 17, 2022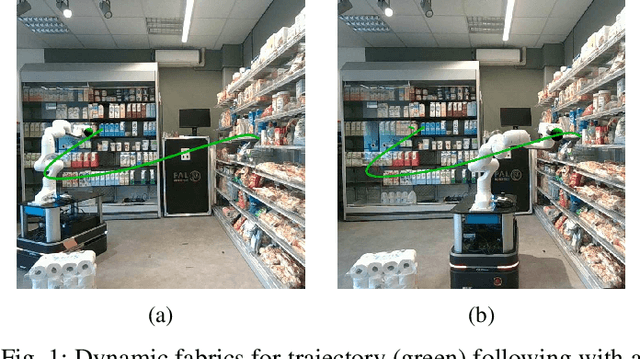
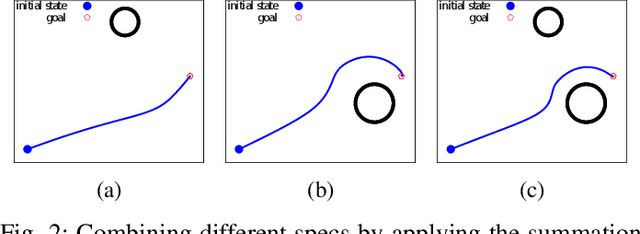
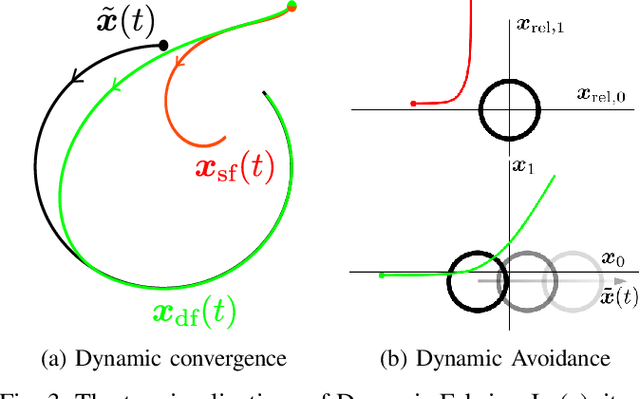
Optimization fabrics represent a geometric approach to real-time motion planning, where trajectories are designed by the composition of several differential equations that exhibit a desired motion behavior. We generalize this framework to dynamic scenarios and prove that fundamental properties can be conserved. We show that convergence to trajectories and avoidance of moving obstacles can be guaranteed using simple construction rules of the components. Additionally, we present the first quantitative comparisons between optimization fabrics and model predictive control and show that optimization fabrics can generate similar trajectories with better scalability, and thus, much higher replanning frequency (up to 500 Hz with a 7 degrees of freedom robotic arm). Finally, we present empirical results on several robots, including a non-holonomic mobile manipulator with 10 degrees of freedom, supporting the theoretical findings.
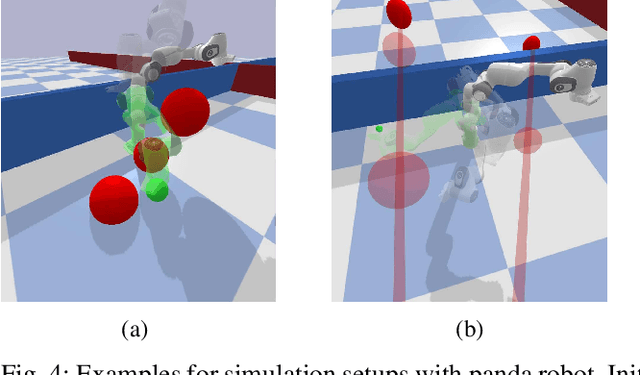
Adaptation through prediction: multisensory active inference torque control
Dec 13, 2021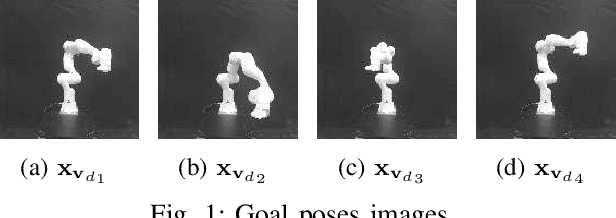
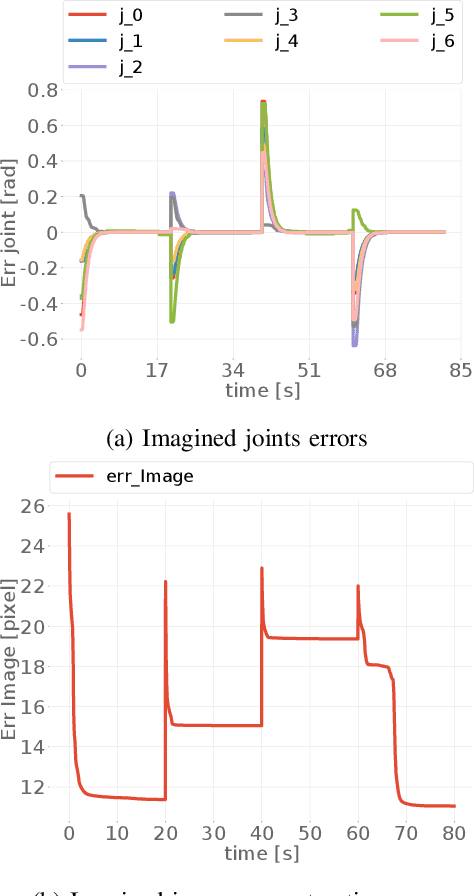
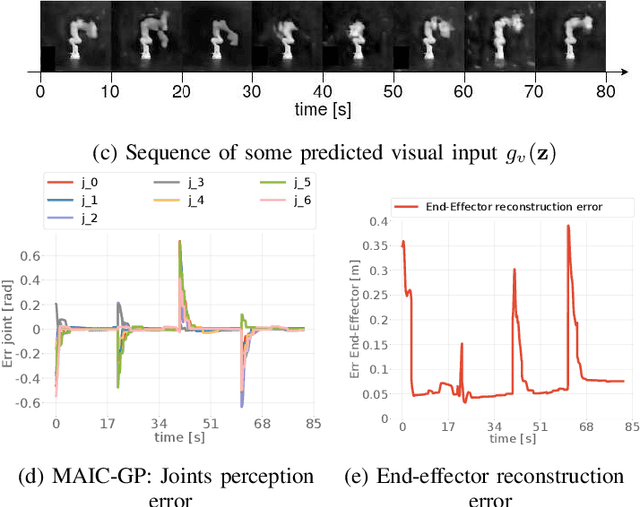
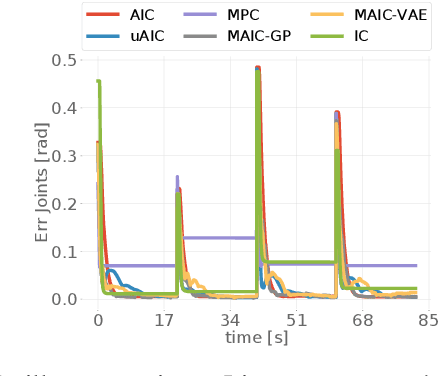
Adaptation to external and internal changes is major for robotic systems in uncertain environments. Here we present a novel multisensory active inference torque controller for industrial arms that shows how prediction can be used to resolve adaptation. Our controller, inspired by the predictive brain hypothesis, improves the capabilities of current active inference approaches by incorporating learning and multimodal integration of low and high-dimensional sensor inputs (e.g., raw images) while simplifying the architecture. We performed a systematic evaluation of our model on a 7DoF Franka Emika Panda robot arm by comparing its behavior with previous active inference baselines and classic controllers, analyzing both qualitatively and quantitatively adaptation capabilities and control accuracy. Results showed improved control accuracy in goal-directed reaching with high noise rejection due to multimodal filtering, and adaptability to dynamical inertial changes, elasticity constraints and human disturbances without the need to relearn the model nor parameter retuning.