 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMUKCa: Accurate and Affordable Cobot Calibration Without External Measurement Devices
Paper and Code
Mar 16, 2025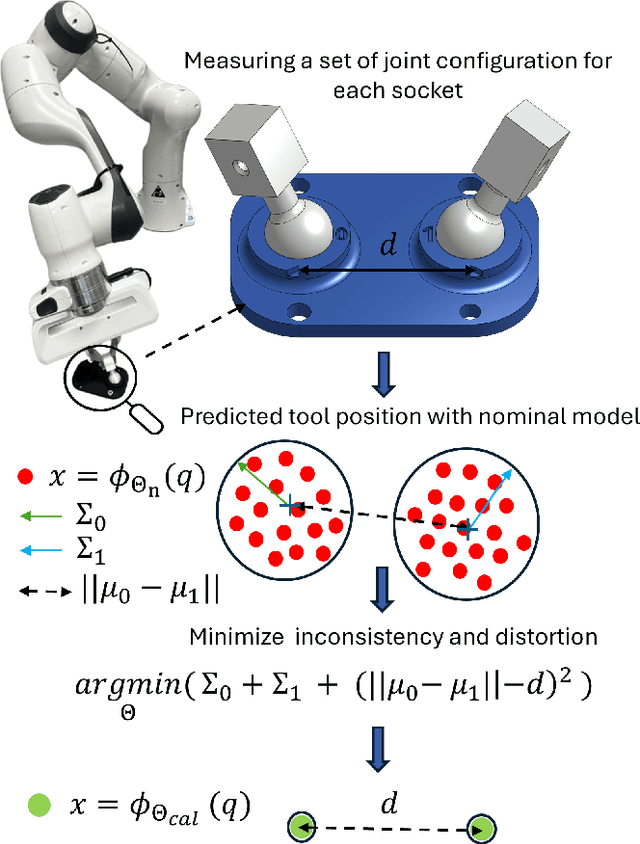
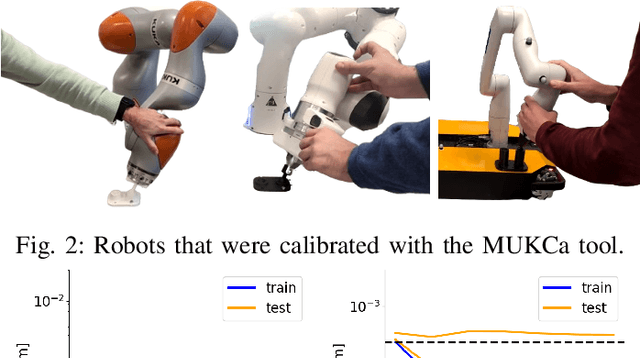
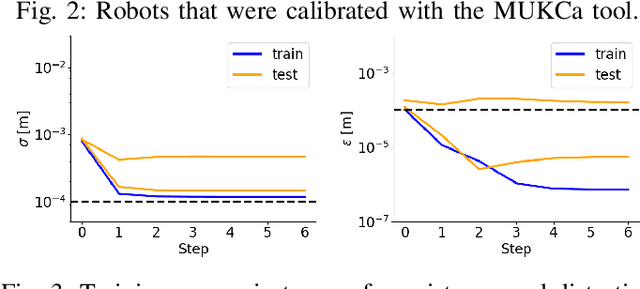
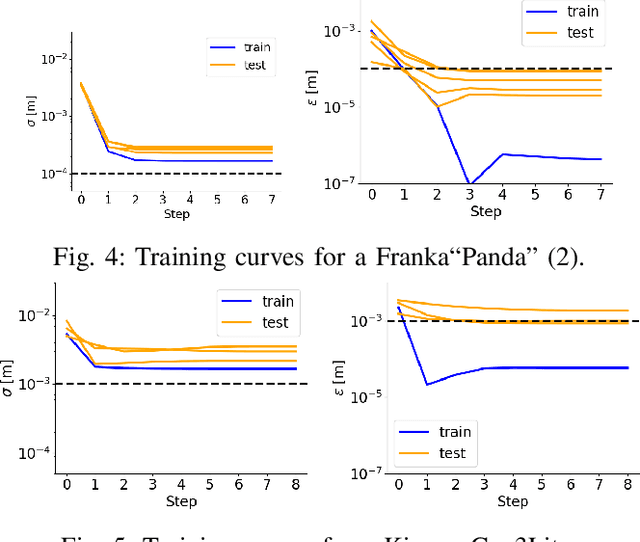
To increase the reliability of collaborative robots in performing daily tasks, we require them to be accurate and not only repeatable. However, having a calibrated kinematics model is regrettably a luxury, as available calibration tools are usually more expensive than the robots themselves. With this work, we aim to contribute to the democratization of cobots calibration by providing an inexpensive yet highly effective alternative to existing tools. The proposed minimalist calibration routine relies on a 3D-printable tool as the only physical aid to the calibration process. This two-socket spherical-joint tool kinematically constrains the robot at the end effector while collecting the training set. An optimization routine updates the nominal model to ensure a consistent prediction for each socket and the undistorted mean distance between them. We validated the algorithm on three robotic platforms: Franka, Kuka, and Kinova Cobots. The calibrated models reduce the mean absolute error from the order of 10 mm to 0.2 mm for both Franka and Kuka robots. We provide two additional experimental campaigns with the Franka Robot to render the improvements more tangible. First, we implement Cartesian control with and without the calibrated model and use it to perform a standard peg-in-the-hole task with a tolerance of 0.4 mm between the peg and the hole. Second, we perform a repeated drawing task combining Cartesian control with learning from demonstration. Both tasks consistently failed when the model was not calibrated, while they consistently succeeded after calibration.