 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
Jan 17, 2024


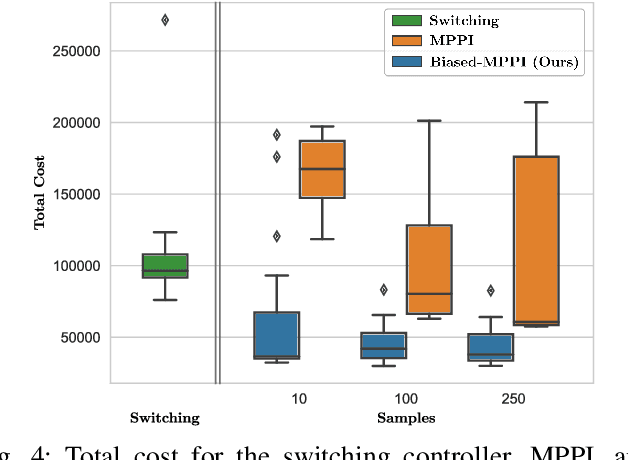
Motion planning for autonomous robots in human-populated environments poses numerous challenges due to uncertainties in the robot's dynamics, environment, and interaction with other agents. Sampling-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have shown promise in addressing these complex motion planning problems. However, the performance of MPPI heavily relies on the choice of the sampling distribution. Existing literature often uses the previously computed input sequence as the mean of a Gaussian distribution for sampling, leading to potential failures and local minima. In this paper, we propose novel derivations of the MPPI method to enhance its efficiency, robustness, and convergence. Our approach includes a mathematical formulation allowing for arbitrary sampling distributions, addressing numerical issues, and alleviating the problem of local minima. We present an efficient importance sampling scheme that combines classical and learning-based ancillary controllers simultaneously, resulting in more informative sampling and control fusion. We demonstrate our proposed scheme's superior efficiency and robustness through experiments by handling model uncertainties, rapid environmental changes and reducing susceptibility to local minima.
Multi-Modal MPPI and Active Inference for Reactive Task and Motion Planning
Dec 04, 2023Task and Motion Planning (TAMP) has made strides in complex manipulation tasks, yet the execution robustness of the planned solutions remains overlooked. In this work, we propose a method for reactive TAMP to cope with runtime uncertainties and disturbances. We combine an Active Inference planner (AIP) for adaptive high-level action selection and a novel Multi-Modal Model Predictive Path Integral controller (M3P2I) for low-level control. This results in a scheme that simultaneously adapts both high-level actions and low-level motions. The AIP generates alternative symbolic plans, each linked to a cost function for M3P2I. The latter employs a physics simulator for diverse trajectory rollouts, deriving optimal control by weighing the different samples according to their cost. This idea enables blending different robot skills for fluid and reactive plan execution, accommodating plan adjustments at both the high and low levels to cope, for instance, with dynamic obstacles or disturbances that invalidate the current plan. We have tested our approach in simulations and real-world scenarios.
Interaction-Aware Sampling-Based MPC with Learned Local Goal Predictions
Sep 26, 2023Motion planning for autonomous robots in tight, interaction-rich, and mixed human-robot environments is challenging. State-of-the-art methods typically separate prediction and planning, predicting other agents' trajectories first and then planning the ego agent's motion in the remaining free space. However, agents' lack of awareness of their influence on others can lead to the freezing robot problem. We build upon Interaction-Aware Model Predictive Path Integral (IA-MPPI) control and combine it with learning-based trajectory predictions, thereby relaxing its reliance on communicated short-term goals for other agents. We apply this framework to Autonomous Surface Vessels (ASVs) navigating urban canals. By generating an artificial dataset in real sections of Amsterdam's canals, adapting and training a prediction model for our domain, and proposing heuristics to extract local goals, we enable effective cooperation in planning. Our approach improves autonomous robot navigation in complex, crowded environments, with potential implications for multi-agent systems and human-robot interaction.
Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations
Jul 18, 2023We present a method for sampling-based model predictive control that makes use of a generic physics simulator as the dynamical model. In particular, we propose a Model Predictive Path Integral controller (MPPI), that uses the GPU-parallelizable IsaacGym simulator to compute the forward dynamics of a problem. By doing so, we eliminate the need for manual encoding of robot dynamics and interactions among objects and allow one to effortlessly solve complex navigation and contact-rich tasks. Since no explicit dynamic modeling is required, the method is easily extendable to different objects and robots. We demonstrate the effectiveness of this method in several simulated and real-world settings, among which mobile navigation with collision avoidance, non-prehensile manipulation, and whole-body control for high-dimensional configuration spaces. This method is a powerful and accessible tool to solve a large variety of contact-rich motion planning tasks.
Multi-Agent Path Integral Control for Interaction-Aware Motion Planning in Urban Canals
Feb 13, 2023



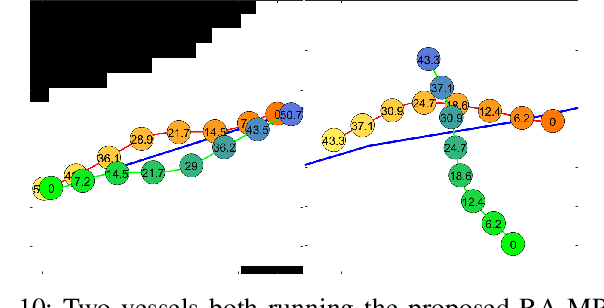
Autonomous vehicles that operate in urban environments shall comply with existing rules and reason about the interactions with other decision-making agents. In this paper, we introduce a decentralized and communication-free interaction-aware motion planner and apply it to Autonomous Surface Vessels (ASVs) in urban canals. We build upon a sampling-based method, namely Model Predictive Path Integral control (MPPI), and employ it to, in each time instance, compute both a collision-free trajectory for the vehicle and a prediction of other agents' trajectories, thus modeling interactions. To improve the method's efficiency in multi-agent scenarios, we introduce a two-stage sample evaluation strategy and define an appropriate cost function to achieve rule compliance. We evaluate this decentralized approach in simulations with multiple vessels in real scenarios extracted from Amsterdam's canals, showing superior performance than a state-of-the-art trajectory optimization framework and robustness when encountering different types of agents.
Regulations Aware Motion Planning for Autonomous Surface Vessels in Urban Canals
Feb 24, 2022
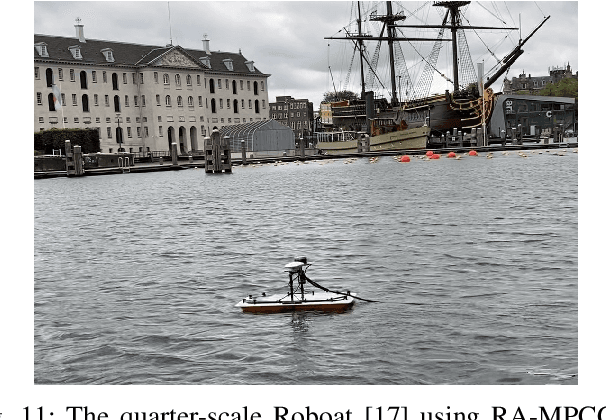
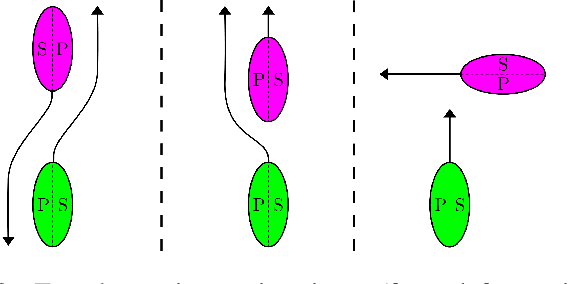
In unstructured urban canals, regulation-aware interactions with other vessels are essential for collision avoidance and social compliance. In this paper, we propose a regulations aware motion planning framework for Autonomous Surface Vessels (ASVs) that accounts for dynamic and static obstacles. Our method builds upon local model predictive contouring control (LMPCC) to generate motion plans satisfying kino-dynamic and collision constraints in real-time while including regulation awareness. To incorporate regulations in the planning stage, we propose a cost function encouraging compliance with rules describing interactions with other vessels similar to COLlision avoidance REGulations at sea (COLREGs). These regulations are essential to make an ASV behave in a predictable and socially compliant manner with regard to other vessels. We compare the framework against baseline methods and show more effective regulation-compliance avoidance of moving obstacles with our motion planner. Additionally, we present experimental results in an outdoor environment