 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiased-MPPI: Informing Sampling-Based Model Predictive Control by Fusing Ancillary Controllers
Paper and Code
Jan 17, 2024


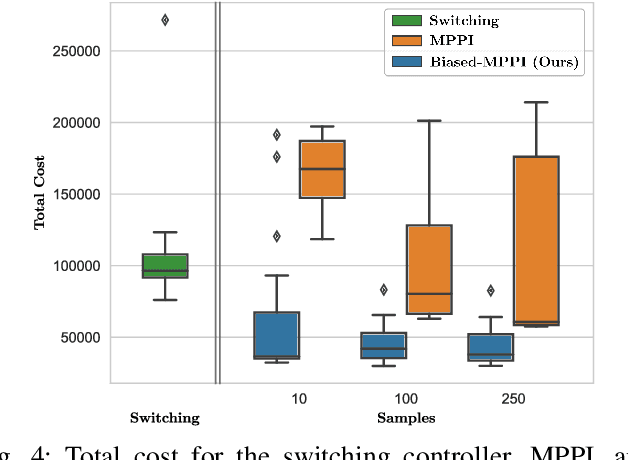
Motion planning for autonomous robots in human-populated environments poses numerous challenges due to uncertainties in the robot's dynamics, environment, and interaction with other agents. Sampling-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have shown promise in addressing these complex motion planning problems. However, the performance of MPPI heavily relies on the choice of the sampling distribution. Existing literature often uses the previously computed input sequence as the mean of a Gaussian distribution for sampling, leading to potential failures and local minima. In this paper, we propose novel derivations of the MPPI method to enhance its efficiency, robustness, and convergence. Our approach includes a mathematical formulation allowing for arbitrary sampling distributions, addressing numerical issues, and alleviating the problem of local minima. We present an efficient importance sampling scheme that combines classical and learning-based ancillary controllers simultaneously, resulting in more informative sampling and control fusion. We demonstrate our proposed scheme's superior efficiency and robustness through experiments by handling model uncertainties, rapid environmental changes and reducing susceptibility to local minima.