 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegulations Aware Motion Planning for Autonomous Surface Vessels in Urban Canals
Paper and Code
Feb 24, 2022
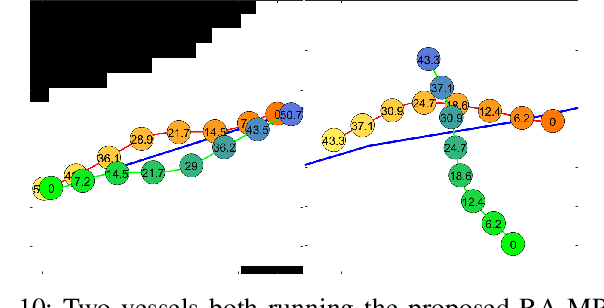
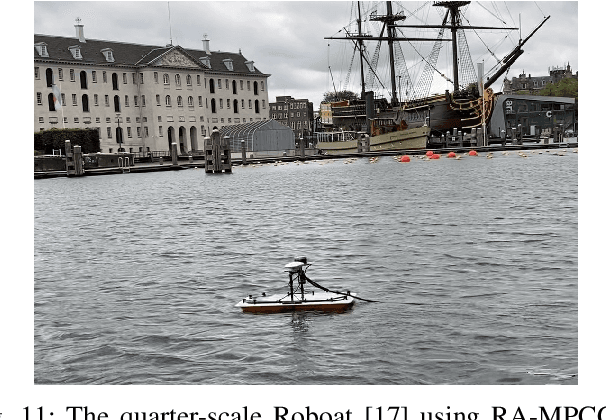
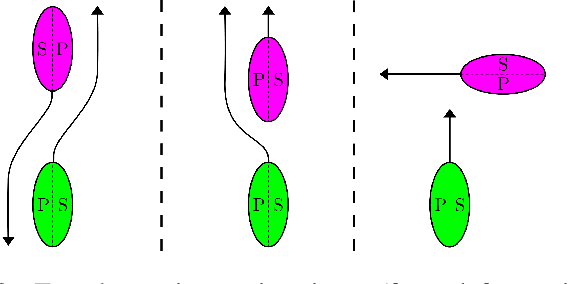
In unstructured urban canals, regulation-aware interactions with other vessels are essential for collision avoidance and social compliance. In this paper, we propose a regulations aware motion planning framework for Autonomous Surface Vessels (ASVs) that accounts for dynamic and static obstacles. Our method builds upon local model predictive contouring control (LMPCC) to generate motion plans satisfying kino-dynamic and collision constraints in real-time while including regulation awareness. To incorporate regulations in the planning stage, we propose a cost function encouraging compliance with rules describing interactions with other vessels similar to COLlision avoidance REGulations at sea (COLREGs). These regulations are essential to make an ASV behave in a predictable and socially compliant manner with regard to other vessels. We compare the framework against baseline methods and show more effective regulation-compliance avoidance of moving obstacles with our motion planner. Additionally, we present experimental results in an outdoor environment