 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValue Guided Exploration with Sub-optimal Controllers for Learning Dexterous Manipulation
Mar 06, 2023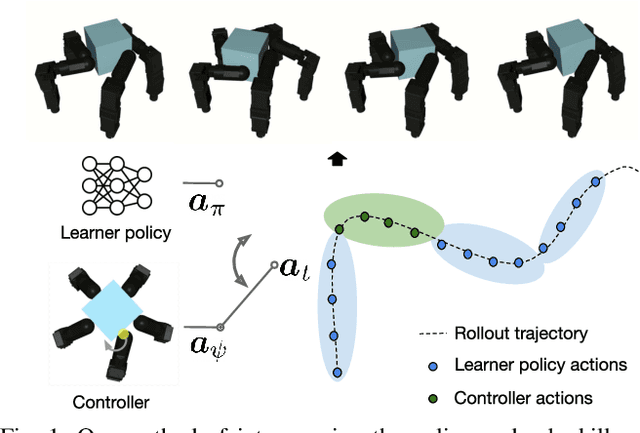
Recently, reinforcement learning has allowed dexterous manipulation skills with increasing complexity. Nonetheless, learning these skills in simulation still exhibits poor sample-efficiency which stems from the fact these skills are learned from scratch without the benefit of any domain expertise. In this work, we aim to improve the sample-efficiency of learning dexterous in-hand manipulation skills using sub-optimal controllers available via domain knowledge. Our framework optimally queries the sub-optimal controllers and guides exploration toward state-space relevant to the task thereby demonstrating improved sample complexity. We show that our framework allows learning from highly sub-optimal controllers and we are the first to demonstrate learning hard-to-explore finger-gaiting in-hand manipulation skills without the use of an exploratory reset distribution.