 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWasserstein Parallel Transport for Predicting the Dynamics of Statistical Systems
Mar 24, 2026Many scientific systems, such as cellular populations or economic cohorts, are naturally described by probability distributions that evolve over time. Predicting how such a system would have evolved under different forces or initial conditions is fundamental to causal inference, domain adaptation, and counterfactual prediction. However, the space of distributions often lacks the vector space structure on which classical methods rely. To address this, we introduce a general notion of parallel dynamics at a distributional level. We base this principle on parallel transport of tangent dynamics along optimal transport geodesics and call it ``Wasserstein Parallel Trends''. By replacing the vector subtraction of classic methods with geodesic parallel transport, we can provide counterfactual comparisons of distributional dynamics in applications such as causal inference, domain adaptation, and batch-effect correction in experimental settings. The main mathematical contribution is a novel notion of fanning scheme on the Wasserstein manifold that allows us to efficiently approximate parallel transport along geodesics while also providing the first theoretical guarantees for parallel transport in the Wasserstein space. We also show that Wasserstein Parallel Trends recovers the classic parallel trends assumption for averages as a special case and derive closed-form parallel transport for Gaussian measures. We deploy the method on synthetic data and two single-cell RNA sequencing datasets to impute gene-expression dynamics across biological systems.
EmbedOR: Provable Cluster-Preserving Visualizations with Curvature-Based Stochastic Neighbor Embeddings
Sep 03, 2025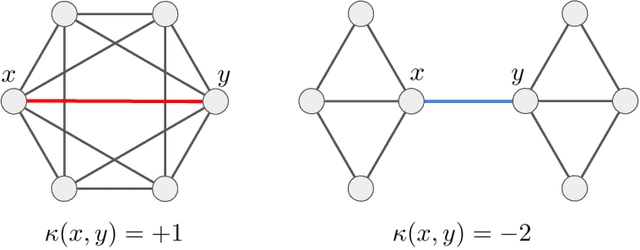
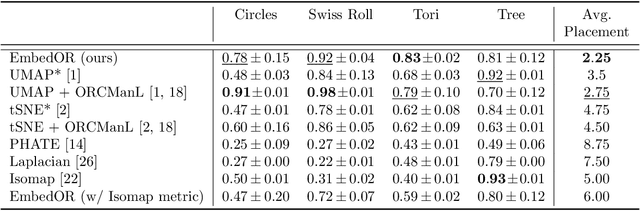
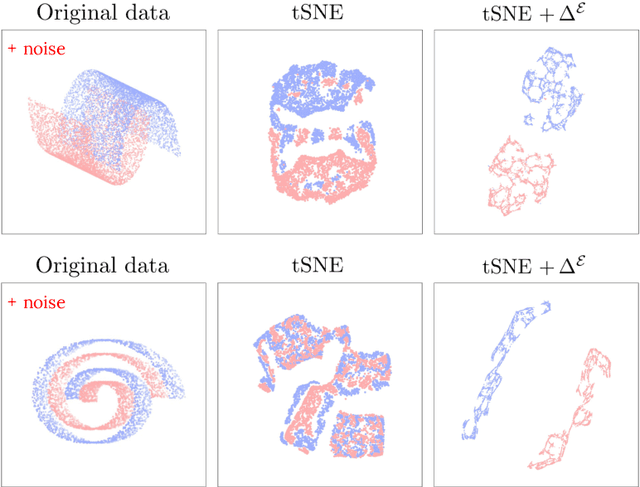

Stochastic Neighbor Embedding (SNE) algorithms like UMAP and tSNE often produce visualizations that do not preserve the geometry of noisy and high dimensional data. In particular, they can spuriously separate connected components of the underlying data submanifold and can fail to find clusters in well-clusterable data. To address these limitations, we propose EmbedOR, a SNE algorithm that incorporates discrete graph curvature. Our algorithm stochastically embeds the data using a curvature-enhanced distance metric that emphasizes underlying cluster structure. Critically, we prove that the EmbedOR distance metric extends consistency results for tSNE to a much broader class of datasets. We also describe extensive experiments on synthetic and real data that demonstrate the visualization and geometry-preservation capabilities of EmbedOR. We find that, unlike other SNE algorithms and UMAP, EmbedOR is much less likely to fragment continuous, high-density regions of the data. Finally, we demonstrate that the EmbedOR distance metric can be used as a tool to annotate existing visualizations to identify fragmentation and provide deeper insight into the underlying geometry of the data.
Recovering Manifold Structure Using Ollivier-Ricci Curvature
Oct 02, 2024

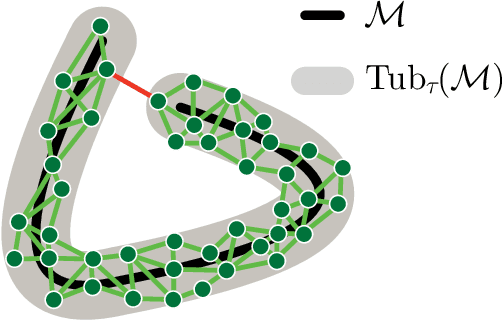

We introduce ORC-ManL, a new algorithm to prune spurious edges from nearest neighbor graphs using a criterion based on Ollivier-Ricci curvature and estimated metric distortion. Our motivation comes from manifold learning: we show that when the data generating the nearest-neighbor graph consists of noisy samples from a low-dimensional manifold, edges that shortcut through the ambient space have more negative Ollivier-Ricci curvature than edges that lie along the data manifold. We demonstrate that our method outperforms alternative pruning methods and that it significantly improves performance on many downstream geometric data analysis tasks that use nearest neighbor graphs as input. Specifically, we evaluate on manifold learning, persistent homology, dimension estimation, and others. We also show that ORC-ManL can be used to improve clustering and manifold learning of single-cell RNA sequencing data. Finally, we provide empirical convergence experiments that support our theoretical findings.
Sampling-based Exploration for Reinforcement Learning of Dexterous Manipulation
Mar 11, 2023



In this paper, we present a novel method for achieving dexterous manipulation of complex objects, while simultaneously securing the object without the use of passive support surfaces. We posit that a key difficulty for training such policies in a Reinforcement Learning framework is the difficulty of exploring the problem state space, as the accessible regions of this space form a complex structure along manifolds of a high-dimensional space. To address this challenge, we use two versions of the non-holonomic Rapidly-Exploring Random Trees algorithm; one version is more general, but requires explicit use of the environment's transition function, while the second version uses manipulation-specific kinematic constraints to attain better sample efficiency. In both cases, we use states found via sampling-based exploration to generate reset distributions that enable training control policies under full dynamic constraints via model-free Reinforcement Learning. We show that these policies are effective at manipulation problems of higher difficulty than previously shown, and also transfer effectively to real robots. Videos of the real-hand demonstrations can be found on the project website: https://sbrl.cs.columbia.edu/