 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwim2Real: VLM-Guided System Identification for Sim-to-Real Transfer
Mar 21, 2026We present Swim2Real, a pipeline that calibrates a 16-parameter robotic fish simulator from swimming videos using vision-language model (VLM) feedback, requiring no hand-designed search stages. Calibrating soft aquatic robots is particularly challenging because nonlinear fluid-structure coupling makes the parameter landscape chaotic, simplified fluid models introduce a persistent sim-to-real gap, and controlled aquatic experiments are difficult to reproduce. Prior work on this platform required three manually tailored stages to handle this complexity. The VLM compares simulated and real videos and proposes parameter updates. A backtracking line search then validates each step size, tripling the accept rate from 14% to 42% by recovering proposals where the direction is correct but the magnitude is too large. Swim2Real calibrates all 16 parameters simultaneously, most closely matching real fish velocities across all motor frequencies (MAE = 7.4 mm/s, 43% lower than the next-best method), with zero outlier seeds across five runs. Motor commands from the trained policy transfer to the physical fish at 50 Hz, completing the pipeline from swimming video to real-world deployment. Downstream RL policies swim 12% farther than those from BayesOpt-calibrated simulators and 90% farther than CMA-ES. These results demonstrate that VLM-guided calibration can close the sim-to-real gap for aquatic robots directly from video, enabling zero-shot RL transfer to physical swimmers without manual system identification, a step toward automated, general-purpose simulator tuning for underwater robotics.
Simple Models, Real Swimming: Digital Twins for Tendon-Driven Underwater Robots
Feb 26, 2026Mimicking the graceful motion of swimming animals remains a core challenge in soft robotics due to the complexity of fluid-structure interaction and the difficulty of controlling soft, biomimetic bodies. Existing modeling approaches are often computationally expensive and impractical for complex control or reinforcement learning needed for realistic motions to emerge in robotic systems. In this work, we present a tendon-driven fish robot modeled in an efficient underwater swimmer environment using a simplified, stateless hydrodynamics formulation implemented in the widespread robotics framework MuJoCo. With just two real-world swimming trajectories, we identify five fluid parameters that allow a matching to experimental behavior and generalize across a range of actuation frequencies. We show that this stateless fluid model can generalize to unseen actuation and outperform classical analytical models such as the elongated body theory. This simulation environment runs faster than real-time and can easily enable downstream learning algorithms such as reinforcement learning for target tracking, reaching a 93% success rate. Due to the simplicity and ease of use of the model and our open-source simulation environment, our results show that even simple, stateless models -- when carefully matched to physical data -- can serve as effective digital twins for soft underwater robots, opening up new directions for scalable learning and control in aquatic environments.
SORS: A Modular, High-Fidelity Simulator for Soft Robots
Dec 17, 2025The deployment of complex soft robots in multiphysics environments requires advanced simulation frameworks that not only capture interactions between different types of material, but also translate accurately to real-world performance. Soft robots pose unique modeling challenges due to their large nonlinear deformations, material incompressibility, and contact interactions, which complicate both numerical stability and physical accuracy. Despite recent progress, robotic simulators often struggle with modeling such phenomena in a scalable and application-relevant manner. We present SORS (Soft Over Rigid Simulator), a versatile, high-fidelity simulator designed to handle these complexities for soft robot applications. Our energy-based framework, built on the finite element method, allows modular extensions, enabling the inclusion of custom-designed material and actuation models. To ensure physically consistent contact handling, we integrate a constrained nonlinear optimization based on sequential quadratic programming, allowing for stable and accurate modeling of contact phenomena. We validate our simulator through a diverse set of real-world experiments, which include cantilever deflection, pressure-actuation of a soft robotic arm, and contact interactions from the PokeFlex dataset. In addition, we showcase the potential of our framework for control optimization of a soft robotic leg. These tests confirm that our simulator can capture both fundamental material behavior and complex actuation dynamics with high physical fidelity. By bridging the sim-to-real gap in these challenging domains, our approach provides a validated tool for prototyping next-generation soft robots, filling the gap of extensibility, fidelity, and usability in the soft robotic ecosystem.
Low Voltage Electrohydraulic Actuators for Untethered Robotics
Jun 01, 2023Rigid robots can be precise in repetitive tasks but struggle in unstructured environments. Nature's versatility in such environments inspires researchers to develop biomimetic robots that incorporate compliant and contracting artificial muscles. Among the recently proposed artificial muscle technologies, electrohydraulic actuators are promising since they offer comparable performance to mammalian muscles in terms of speed and power density. However, they require high driving voltages and have safety concerns due to exposed electrodes. These high voltages lead to either bulky or inefficient driving electronics that make untethered, high-degree-of-freedom bio-inspired robots difficult to realize. Here, we present low voltage electrohydraulic actuators (LEAs) that match mammalian skeletal muscles in average power density (50.5 W/kg) and peak strain rate (971 percent/s) at a driving voltage of just 1100 V. This driving voltage is approx. 5 - 7 times lower compared to other electrohydraulic actuators using paraelectric dielectrics. Furthermore, LEAs are safe to touch, waterproof, and self-clearing, which makes them easy to implement in wearables and robotics. We characterize, model, and physically validate key performance metrics of the actuator and compare its performance to state-of-the-art electrohydraulic designs. Finally, we demonstrate the utility of our actuators on two muscle-based electrohydraulic robots: an untethered soft robotic swimmer and a robotic gripper. We foresee that LEAs can become a key building block for future highly-biomimetic untethered robots and wearables with many independent artificial muscles such as biomimetic hands, faces, or exoskeletons.
Aquarium: A Fully Differentiable Fluid-Structure Interaction Solver for Robotics Applications
Jan 17, 2023



We present Aquarium, a differentiable fluid-structure interaction solver for robotics that offers stable simulation, accurate coupled robot-fluid physics, and full differentiability with respect to fluid states, robot states, and shape parameters. Aquarium achieves stable simulation with accurate flow physics by integrating over the discrete, incompressible Navier-Stokes equations directly using a fully-implicit Crank-Nicolson scheme with a second-order finite-volume spatial discretization. The robot and fluid physics are coupled using the immersed boundary method by formulating the no-slip condition as an equality constraint applied directly to the Navier-Stokes system. This choice of coupling allows the fluid-structure interaction to be posed and solved as a nonlinear optimization problem. This optimization-based formulation is then exploited using the implicit-function theorem to compute derivatives. The derivatives can then be passed to a gradient-based optimization or learning framework. We demonstrate Aquarium's ability to accurately simulate coupled fluid-solid physics with numerous examples, including a cylinder in free stream and a soft robotic tail with hardware validation. We also demonstrate Aquarium's ability to provide full, analytical gradients by performing both shape and gait optimization of a robotic fish tail to maximize generated thrust.
Planar Modeling and Sim-to-Real of a Tethered Multimaterial Soft Swimmer Driven by Peano-HASELs
Aug 02, 2022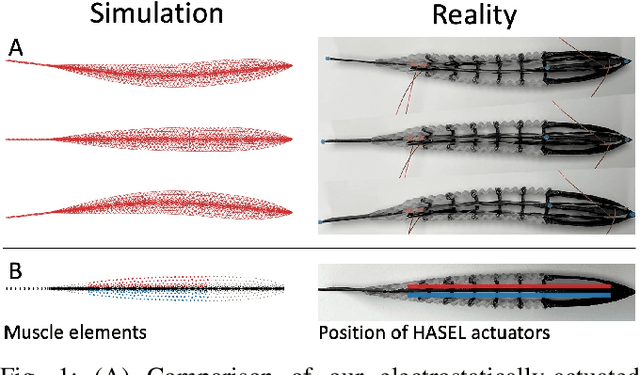
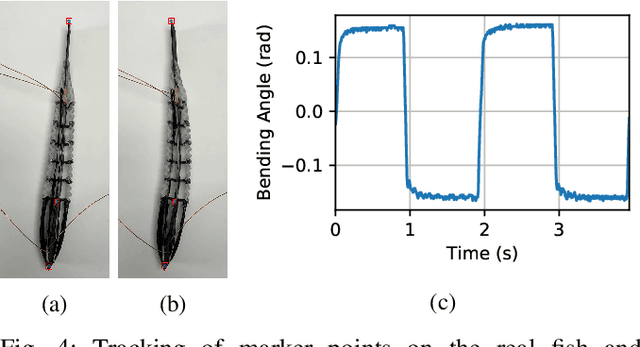
Soft robotics has the potential to revolutionize robotic locomotion, in particular, soft robotic swimmers offer a minimally invasive and adaptive solution to explore and preserve our oceans. Unfortunately, current soft robotic swimmers are vastly inferior to evolved biological swimmers, especially in terms of controllability, efficiency, maneuverability, and longevity. Additionally, the tedious iterative fabrication and empirical testing required to design soft robots has hindered their optimization. In this work, we tackle this challenge by providing an efficient and straightforward pipeline for designing and fabricating soft robotic swimmers equipped with electrostatic actuation. We streamline the process to allow for rapid additive manufacturing, and show how a differentiable simulation can be used to match a simplified model to the real deformation of a robotic swimmer. We perform several experiments with the fabricated swimmer by varying the voltage and actuation frequency of the swimmer's antagonistic muscles. We show how the voltage and frequency vary the locomotion speed of the swimmer while moving in liquid oil and observe a clear optimum in forward swimming speed. The differentiable simulation model we propose has various downstream applications, such as control and shape optimization of the swimmer; optimization results can be directly mapped back to the real robot through our sim-to-real matching.
Physics-constrained Unsupervised Learning of Partial Differential Equations using Meshes
Mar 30, 2022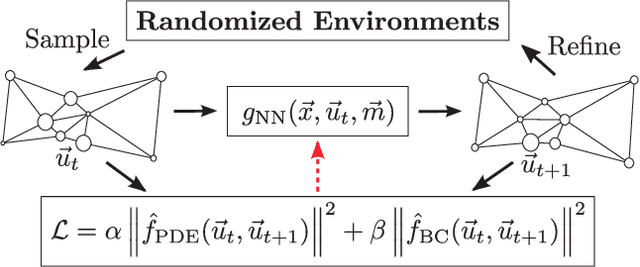

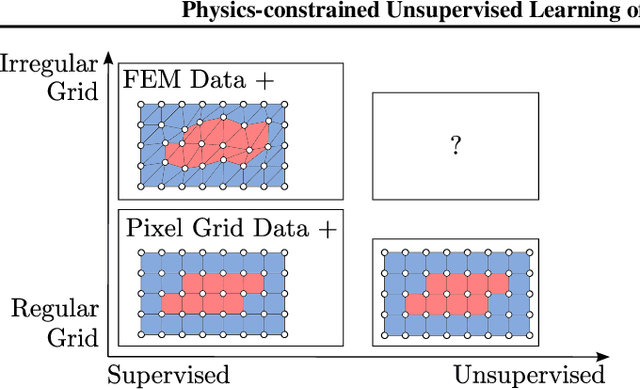
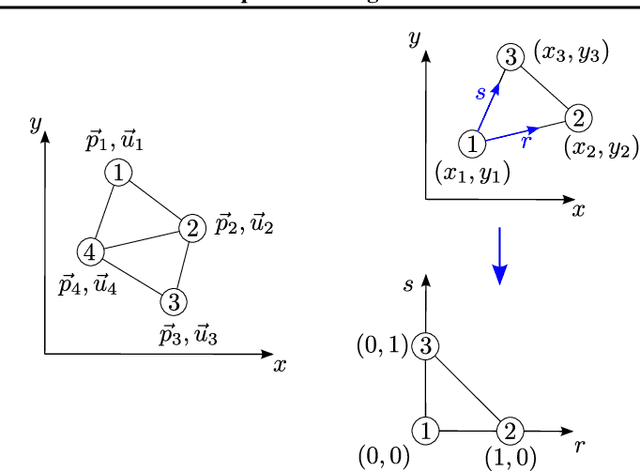
Enhancing neural networks with knowledge of physical equations has become an efficient way of solving various physics problems, from fluid flow to electromagnetism. Graph neural networks show promise in accurately representing irregularly meshed objects and learning their dynamics, but have so far required supervision through large datasets. In this work, we represent meshes naturally as graphs, process these using Graph Networks, and formulate our physics-based loss to provide an unsupervised learning framework for partial differential equations (PDE). We quantitatively compare our results to a classical numerical PDE solver, and show that our computationally efficient approach can be used as an interactive PDE solver that is adjusting boundary conditions in real-time and remains sufficiently close to the baseline solution. Our inherently differentiable framework will enable the application of PDE solvers in interactive settings, such as model-based control of soft-body deformations, or in gradient-based optimization methods that require a fully differentiable pipeline.