 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-Integrated Safety Critical Control via Analytic Collision Cone Barrier Functions on 3D Gaussian Splatting
Sep 17, 2025We present a perception-driven safety filter that converts each 3D Gaussian Splat (3DGS) into a closed-form forward collision cone, which in turn yields a first-order control barrier function (CBF) embedded within a quadratic program (QP). By exploiting the analytic geometry of splats, our formulation provides a continuous, closed-form representation of collision constraints that is both simple and computationally efficient. Unlike distance-based CBFs, which tend to activate reactively only when an obstacle is already close, our collision-cone CBF activates proactively, allowing the robot to adjust earlier and thereby produce smoother and safer avoidance maneuvers at lower computational cost. We validate the method on a large synthetic scene with approximately 170k splats, where our filter reduces planning time by a factor of 3 and significantly decreased trajectory jerk compared to a state-of-the-art 3DGS planner, while maintaining the same level of safety. The approach is entirely analytic, requires no high-order CBF extensions (HOCBFs), and generalizes naturally to robots with physical extent through a principled Minkowski-sum inflation of the splats. These properties make the method broadly applicable to real-time navigation in cluttered, perception-derived extreme environments, including space robotics and satellite systems.
SSPARE: Space Solar Power Autonomously Reconfigurable Elements
Jul 08, 2024
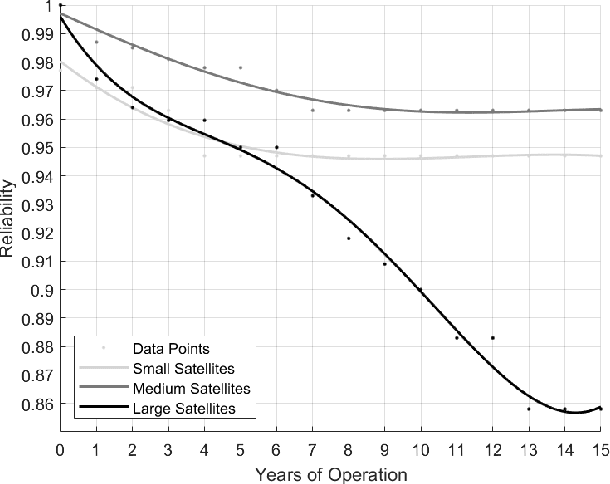
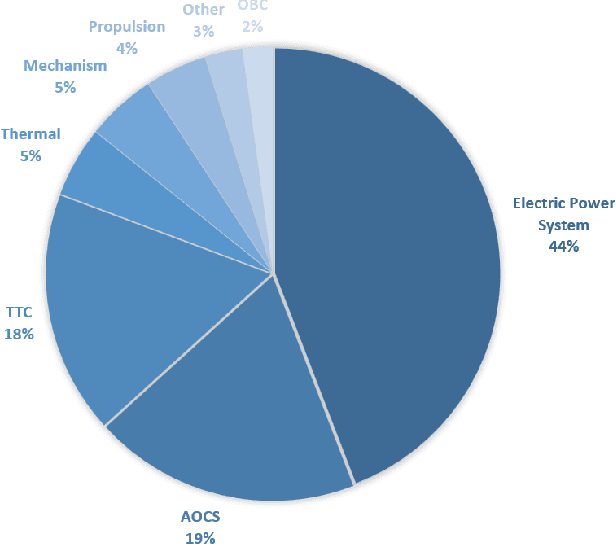

GEO communication satellites generate significant revenue but can only function reliably for approximately 10 years on orbit. One of the main drivers that limits the reliability of a GEO satellite is the electric power system, and in particular, anomalies related to batteries and degradation of the solar arrays. Given the high cost and relatively short lifespan of GEO satellites, there has been increased research activity towards developing on-orbit servicing systems. However, most of the existing servicing systems are expensive, highly customized, and focus on refueling tasks. On-orbit refueling can be very useful, however, it does not improve satellite reliability which is crucial for long-term missions. Therefore, we propose SSPARE (Space Solar Power Autonomously Reconfigurable Elements), a cost-effective, self-servicing power system. Aside from improving satellite reliability, SSPARE enables to generate up to 6 times more power per launch compared to a traditional GEO communication satellite. This study explores why GEO satellites fail and elaborates on the SSPARE concept. A comparison of SSPARE against a traditional on-orbit servicing mission highlights the benefits of the proposed concept. With humanity striving to become more and more Earth-independent, this work aims to build a foundation for future systems such as large solar power farms on-orbit.
Planar Modeling and Sim-to-Real of a Tethered Multimaterial Soft Swimmer Driven by Peano-HASELs
Aug 02, 2022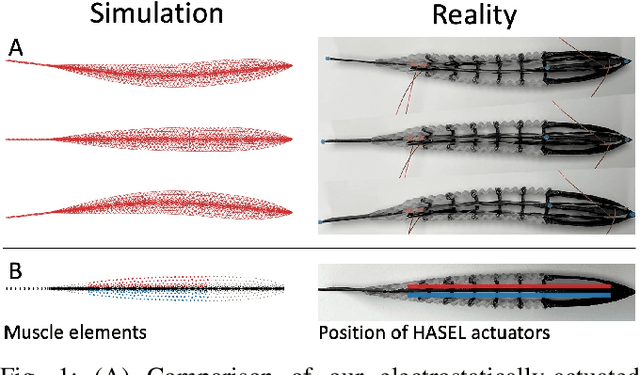
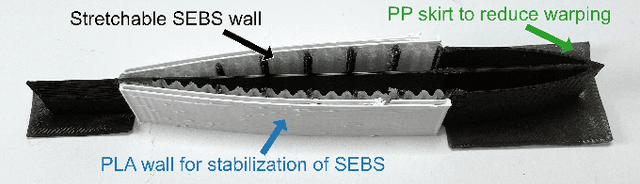
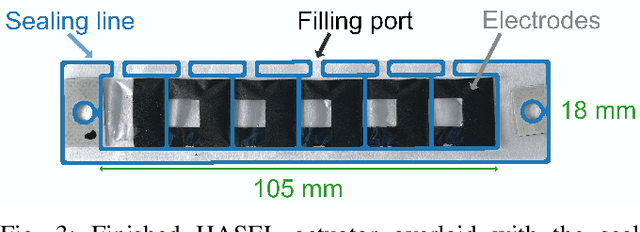
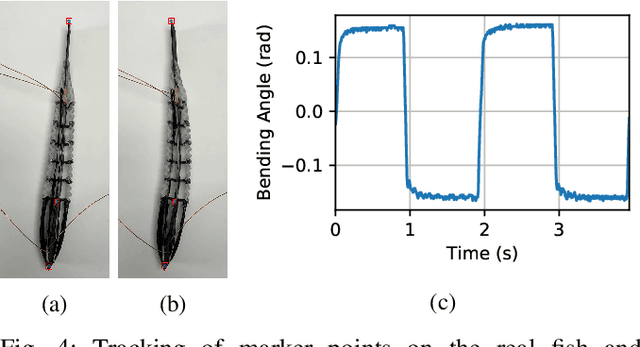
Soft robotics has the potential to revolutionize robotic locomotion, in particular, soft robotic swimmers offer a minimally invasive and adaptive solution to explore and preserve our oceans. Unfortunately, current soft robotic swimmers are vastly inferior to evolved biological swimmers, especially in terms of controllability, efficiency, maneuverability, and longevity. Additionally, the tedious iterative fabrication and empirical testing required to design soft robots has hindered their optimization. In this work, we tackle this challenge by providing an efficient and straightforward pipeline for designing and fabricating soft robotic swimmers equipped with electrostatic actuation. We streamline the process to allow for rapid additive manufacturing, and show how a differentiable simulation can be used to match a simplified model to the real deformation of a robotic swimmer. We perform several experiments with the fabricated swimmer by varying the voltage and actuation frequency of the swimmer's antagonistic muscles. We show how the voltage and frequency vary the locomotion speed of the swimmer while moving in liquid oil and observe a clear optimum in forward swimming speed. The differentiable simulation model we propose has various downstream applications, such as control and shape optimization of the swimmer; optimization results can be directly mapped back to the real robot through our sim-to-real matching.
Flying Hydraulically Amplified Electrostatic Gripper System for Aerial Object Manipulation
May 25, 2022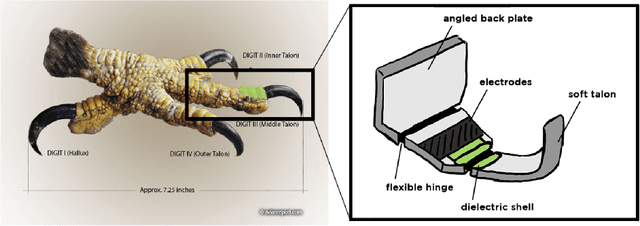
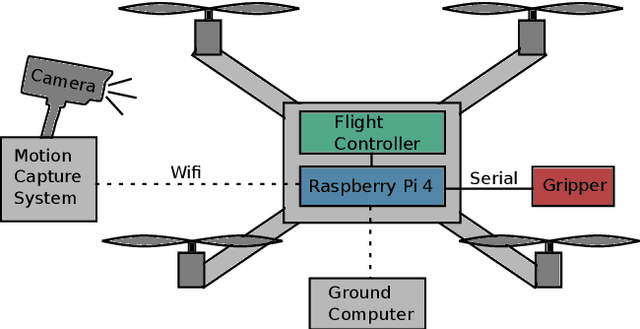
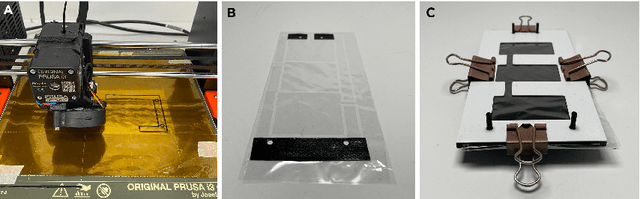
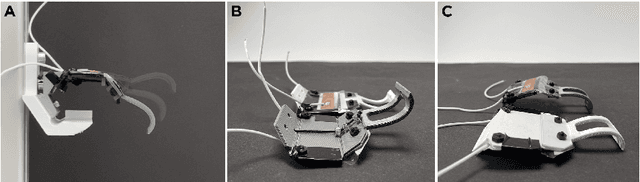
Rapid and versatile object manipulation in air is an open challenge. An energy-efficient and adaptive soft gripper combined with an agile aerial vehicle could revolutionize aerial robotic manipulation in areas such as warehousing. This paper presents a bio-inspired gripper powered by hydraulically amplified electrostatic actuators mounted to a quadcopter that can interact safely and naturally with its environment. Our gripping concept is motivated by an eagle's talon. Our custom multi-actuator type is inspired by a previous scorpion tail design (consisting of a base electrode and pouches stacked adjacently) and spider-inspired joints (classic pouch motors with a flexible hinge layer). A fusion of these two concepts realizes a higher force output than single-actuator types under considerable deflections of up to 25{\deg}. By adding a sandwich hinge layer structure to the classic pouch motor concept we improve the overall robustness of the gripper. We show, for the first time, that soft manipulation in air is possible using electrostatic actuation. This study demonstrates the high potential of untethered hydraulically amplified actuators for the future of robotic manipulation. Our lightweight and bio-inspired system opens up the use of hydraulic electrostatic actuators in aerial mobile systems.