 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Adaptive Approach to Dynamic Control of Soft Continuum Manipulators
Sep 23, 2021
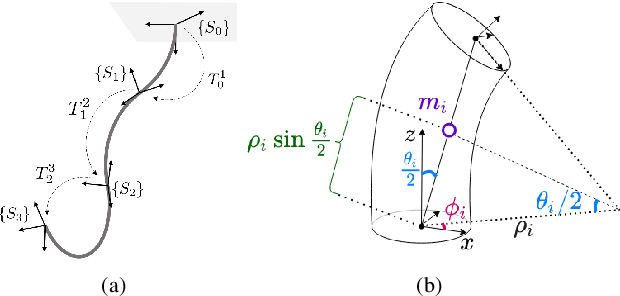

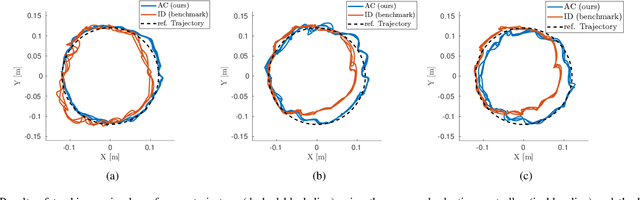
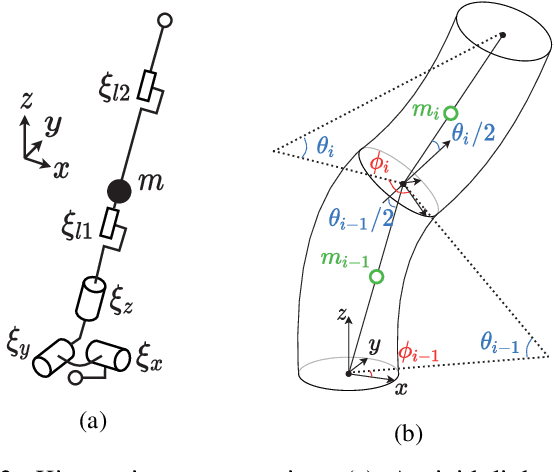
Soft robots are made of compliant and deformable materials and can perform tasks challenging for conventional rigid robots. The inherent compliance of soft robots makes them more suitable and adaptable for interactions with humans and the environment. However, this preeminence comes at a cost: their continuum nature makes it challenging to develop robust model-based control strategies. Specifically, an adaptive control approach addressing this challenge has not yet been applied to physical soft robotic arms. This work presents a reformulation of dynamics for a soft continuum manipulator using the Euler-Lagrange method. The proposed model eliminates the simplifying assumption made in previous works and provides a more accurate description of the robot's inertia. Based on our model, we introduce a task-space adaptive control scheme. This controller is robust against model parameter uncertainties and unknown input disturbances. The controller is implemented on a physical soft continuum arm. A series of experiments were carried out to validate the effectiveness of the controller in task-space trajectory tracking under different payloads. The controller outperforms the state-of-the-art method both in terms of accuracy and robustness. Moreover, the proposed model-based control design is flexible and can be generalized to any continuum robotic arm with an arbitrary number of continuum segments.
SoPrA: Fabrication & Dynamical Modeling of a Scalable Soft Continuum Robotic Arm with Integrated Proprioceptive Sensing
Mar 22, 2021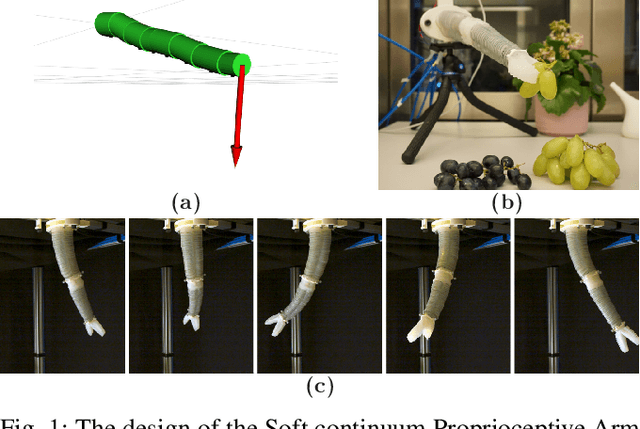
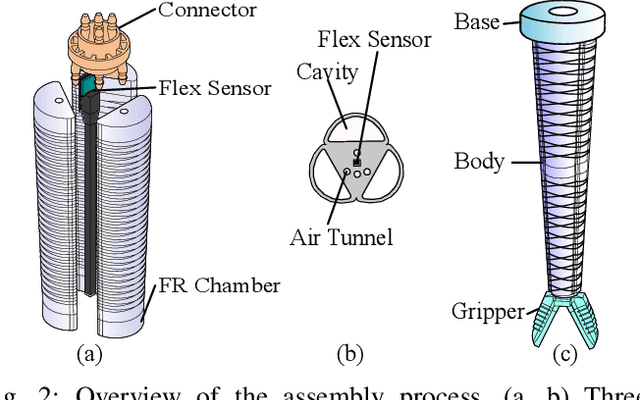
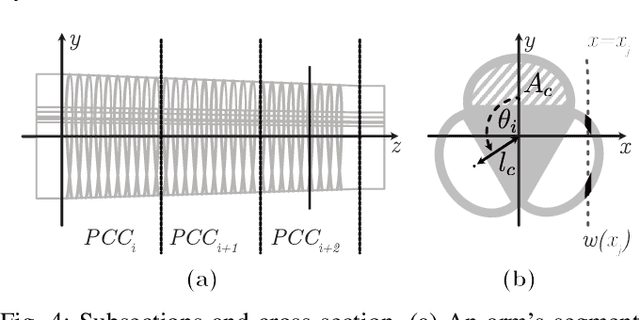
Due to their inherent compliance, soft robots are more versatile than rigid linked robots when they interact with their environment, such as object manipulation or biomimetic motion, and considered the key element in introducing robots to everyday environments. Although various soft robotic actuators exist, past research has focused primarily on designing and analyzing single components. Limited effort has been made to combine each component to create an overall capable, integrated soft robot. Ideally, the behavior of such a robot can be accurately modeled, and its motion within an environment uses its proprioception, without requiring external sensors. This work presents a design and modeling process for a Soft continuum Proprioceptive Arm (SoPrA) actuated by pneumatics. The integrated design is suitable for an analytical model due to its internal capacitive flex sensor for proprioceptive measurements and its fiber-reinforced fluidic elastomer actuators. The proposed analytical dynamical model accounts for the inertial effects of the actuator's mass and the material properties, and predicts in real-time the soft robot's behavior. Our estimation method integrates the analytical model with proprioceptive sensors to calculate external forces, all without relying on an external motion capture system. SoPrA is validated in a series of experiments demonstrating the model's and sensor's accuracy in estimation. SoPrA will enable soft arm manipulation including force sensing while operating in obstructed environments that disallows exteroceptive measurements.