 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystem Design of the Ultra Mobility Vehicle: A Driving, Balancing, and Jumping Bicycle Robot
Feb 25, 2026Trials cyclists and mountain bike riders can hop, jump, balance, and drive on one or both wheels. This versatility allows them to achieve speed and energy-efficiency on smooth terrain and agility over rough terrain. Inspired by these athletes, we present the design and control of a robotic platform, Ultra Mobility Vehicle (UMV), which combines a bicycle and a reaction mass to move dynamically with minimal actuated degrees of freedom. We employ a simulation-driven design optimization process to synthesize a spatial linkage topology with a focus on vertical jump height and momentum-based balancing on a single wheel contact. Using a constrained Reinforcement Learning (RL) framework, we demonstrate zero-shot transfer of diverse athletic behaviors, including track-stands, jumps, wheelies, rear wheel hopping, and front flips. This 23.5 kg robot is capable of high speeds (8 m/s) and jumping on and over large obstacles (1 m tall, or 130% of the robot's nominal height).
Attention-Based Map Encoding for Learning Generalized Legged Locomotion
Jun 11, 2025Dynamic locomotion of legged robots is a critical yet challenging topic in expanding the operational range of mobile robots. It requires precise planning when possible footholds are sparse, robustness against uncertainties and disturbances, and generalizability across diverse terrains. While traditional model-based controllers excel at planning on complex terrains, they struggle with real-world uncertainties. Learning-based controllers offer robustness to such uncertainties but often lack precision on terrains with sparse steppable areas. Hybrid methods achieve enhanced robustness on sparse terrains by combining both methods but are computationally demanding and constrained by the inherent limitations of model-based planners. To achieve generalized legged locomotion on diverse terrains while preserving the robustness of learning-based controllers, this paper proposes to learn an attention-based map encoding conditioned on robot proprioception, which is trained as part of the end-to-end controller using reinforcement learning. We show that the network learns to focus on steppable areas for future footholds when the robot dynamically navigates diverse and challenging terrains. We synthesize behaviors that exhibit robustness against uncertainties while enabling precise and agile traversal of sparse terrains. Additionally, our method offers a way to interpret the topographical perception of a neural network. We have trained two controllers for a 12-DoF quadrupedal robot and a 23-DoF humanoid robot respectively and tested the resulting controllers in the real world under various challenging indoor and outdoor scenarios, including ones unseen during training.
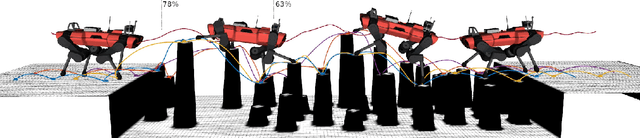
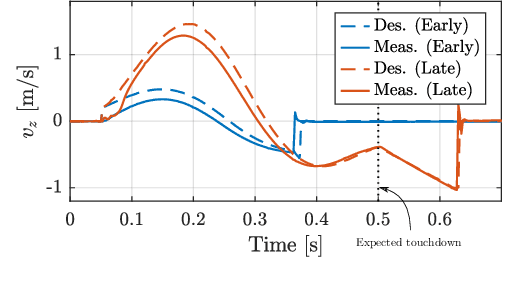
DTC: Deep Tracking Control -- A Unifying Approach to Model-Based Planning and Reinforcement-Learning for Versatile and Robust Locomotion
Sep 27, 2023Legged locomotion is a complex control problem that requires both accuracy and robustness to cope with real-world challenges. Legged systems have traditionally been controlled using trajectory optimization with inverse dynamics. Such hierarchical model-based methods are appealing due to intuitive cost function tuning, accurate planning, and most importantly, the insightful understanding gained from more than one decade of extensive research. However, model mismatch and violation of assumptions are common sources of faulty operation and may hinder successful sim-to-real transfer. Simulation-based reinforcement learning, on the other hand, results in locomotion policies with unprecedented robustness and recovery skills. Yet, all learning algorithms struggle with sparse rewards emerging from environments where valid footholds are rare, such as gaps or stepping stones. In this work, we propose a hybrid control architecture that combines the advantages of both worlds to simultaneously achieve greater robustness, foot-placement accuracy, and terrain generalization. Our approach utilizes a model-based planner to roll out a reference motion during training. A deep neural network policy is trained in simulation, aiming to track the optimized footholds. We evaluate the accuracy of our locomotion pipeline on sparse terrains, where pure data-driven methods are prone to fail. Furthermore, we demonstrate superior robustness in the presence of slippery or deformable ground when compared to model-based counterparts. Finally, we show that our proposed tracking controller generalizes across different trajectory optimization methods not seen during training. In conclusion, our work unites the predictive capabilities and optimality guarantees of online planning with the inherent robustness attributed to offline learning.
Perceptive Locomotion through Nonlinear Model Predictive Control
Aug 17, 2022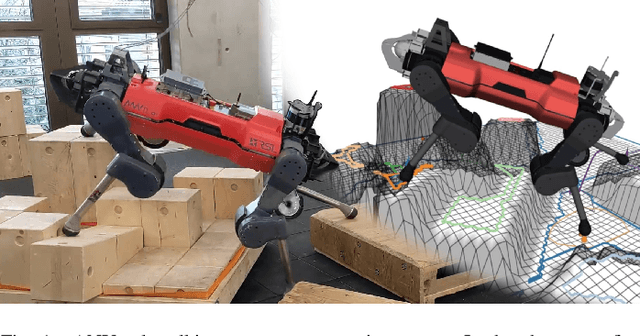
Dynamic locomotion in rough terrain requires accurate foot placement, collision avoidance, and planning of the underactuated dynamics of the system. Reliably optimizing for such motions and interactions in the presence of imperfect and often incomplete perceptive information is challenging. We present a complete perception, planning, and control pipeline, that can optimize motions for all degrees of freedom of the robot in real-time. To mitigate the numerical challenges posed by the terrain a sequence of convex inequality constraints is extracted as local approximations of foothold feasibility and embedded into an online model predictive controller. Steppability classification, plane segmentation, and a signed distance field are precomputed per elevation map to minimize the computational effort during the optimization. A combination of multiple-shooting, real-time iteration, and a filter-based line-search are used to solve the formulated problem reliably and at high rate. We validate the proposed method in scenarios with gaps, slopes, and stepping stones in simulation and experimentally on the ANYmal quadruped platform, resulting in state-of-the-art dynamic climbing.
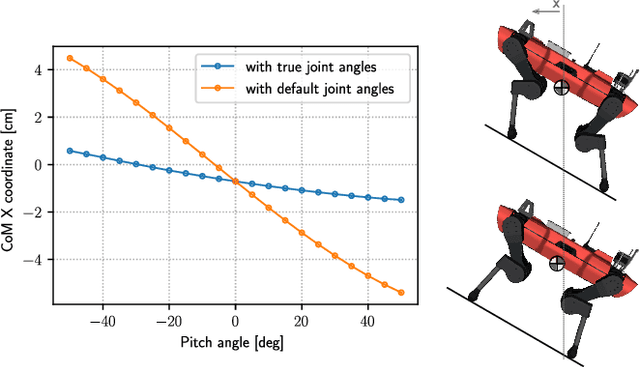
TAMOLS: Terrain-Aware Motion Optimization for Legged Systems
Jul 05, 2022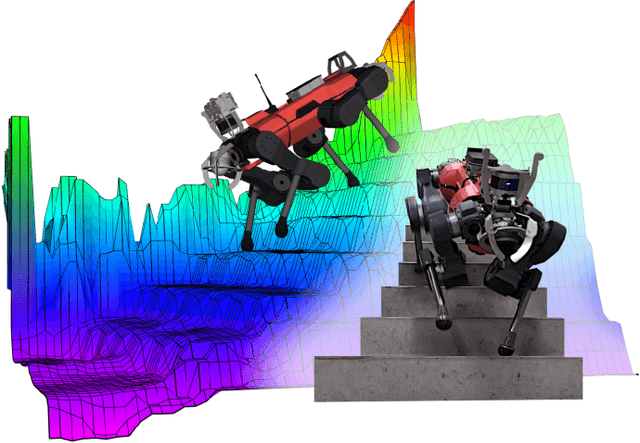
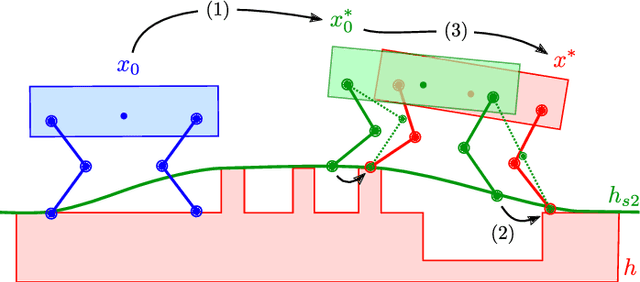

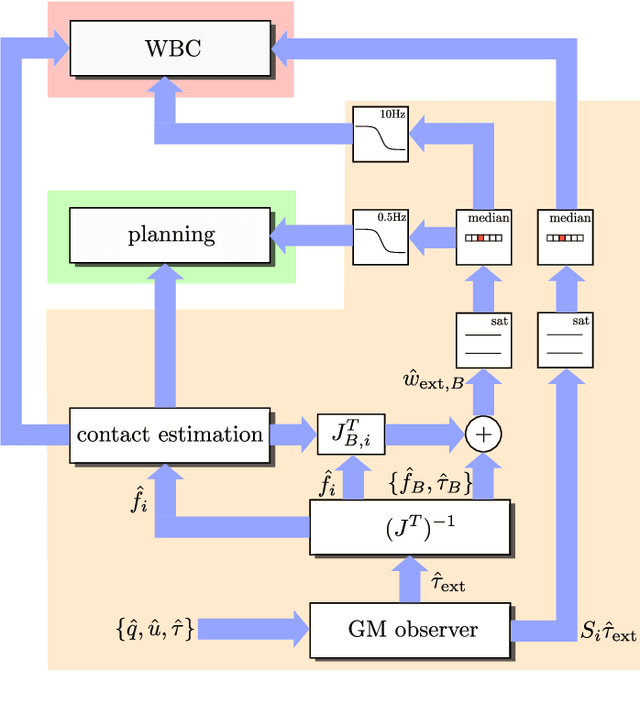
Terrain geometry is, in general, non-smooth, non-linear, non-convex, and, if perceived through a robot-centric visual unit, appears partially occluded and noisy. This work presents the complete control pipeline capable of handling the aforementioned problems in real-time. We formulate a trajectory optimization problem that jointly optimizes over the base pose and footholds, subject to a heightmap. To avoid converging into undesirable local optima, we deploy a graduated optimization technique. We embed a compact, contact-force free stability criterion that is compatible with the non-flat ground formulation. Direct collocation is used as transcription method, resulting in a non-linear optimization problem that can be solved online in less than ten milliseconds. To increase robustness in the presence of external disturbances, we close the tracking loop with a momentum observer. Our experiments demonstrate stair climbing, walking on stepping stones, and over gaps, utilizing various dynamic gaits.
Elevation Mapping for Locomotion and Navigation using GPU
Apr 27, 2022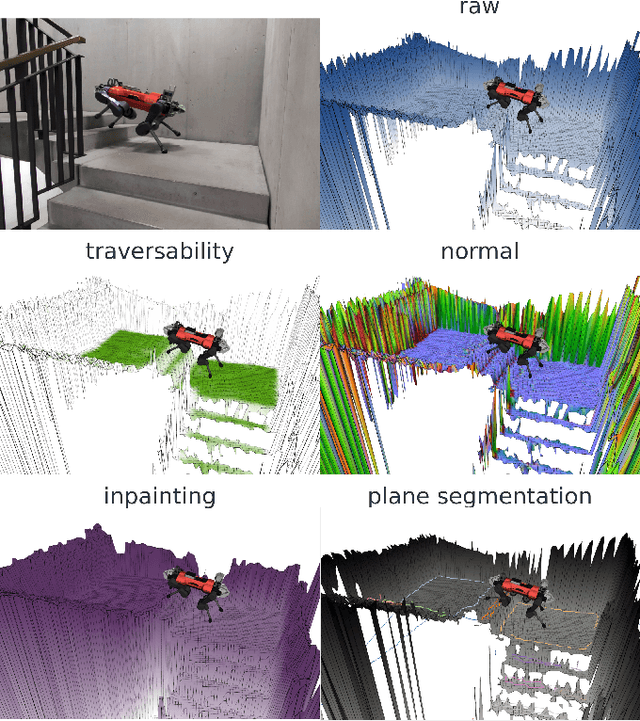
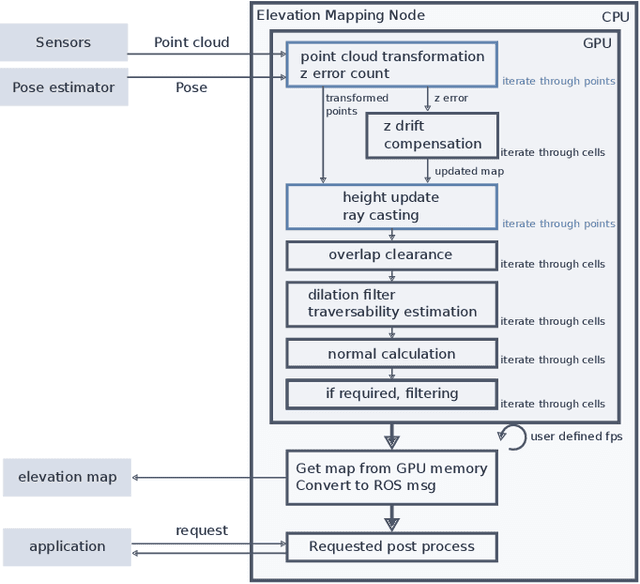
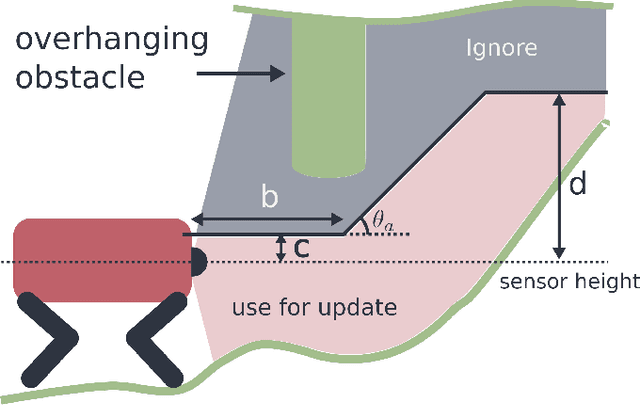
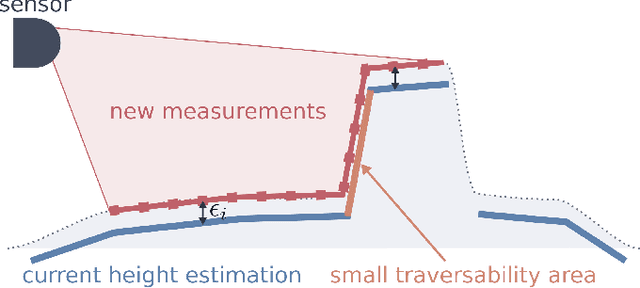
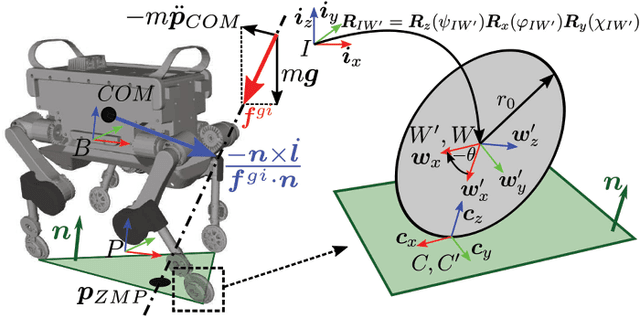
Perceiving the surrounding environment is crucial for autonomous mobile robots. An elevation map provides a memory-efficient and simple yet powerful geometric representation for ground robots. The robots can use this information for navigation in an unknown environment or perceptive locomotion control over rough terrain. Depending on the application, various post processing steps may be incorporated, such as smoothing, inpainting or plane segmentation. In this work, we present an elevation mapping pipeline leveraging GPU for fast and efficient processing with additional features both for navigation and locomotion. We demonstrated our mapping framework through extensive hardware experiments. Our mapping software was successfully deployed for underground exploration during DARPA Subterranean Challenge and for various experiments of quadrupedal locomotion.
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022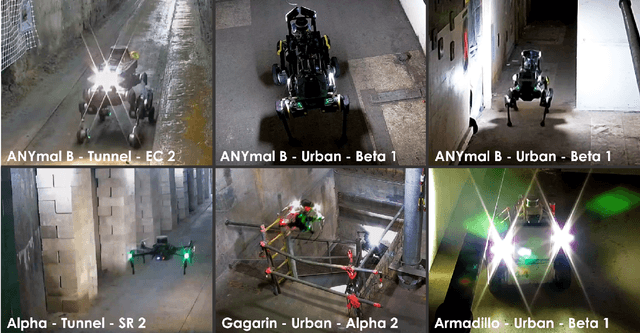
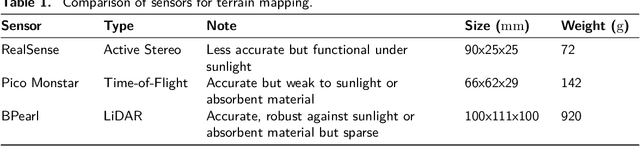

Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.
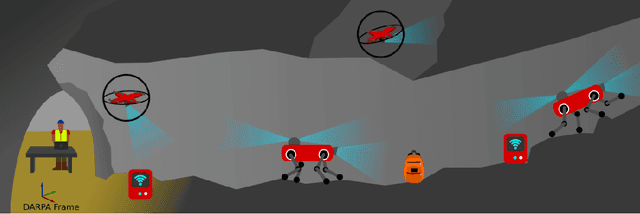
Keep Rollin' - Whole-Body Motion Control and Planning for Wheeled Quadrupedal Robots
Feb 07, 2019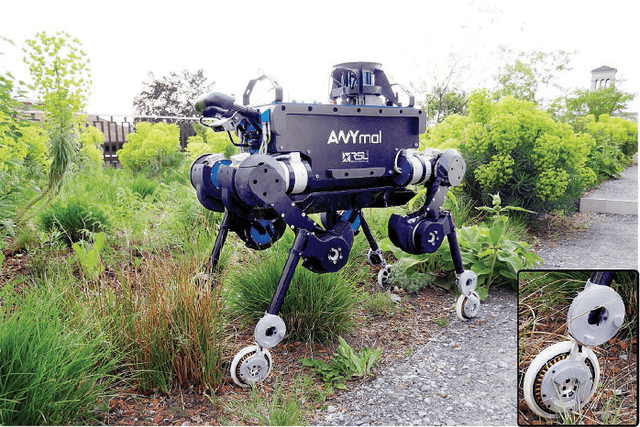
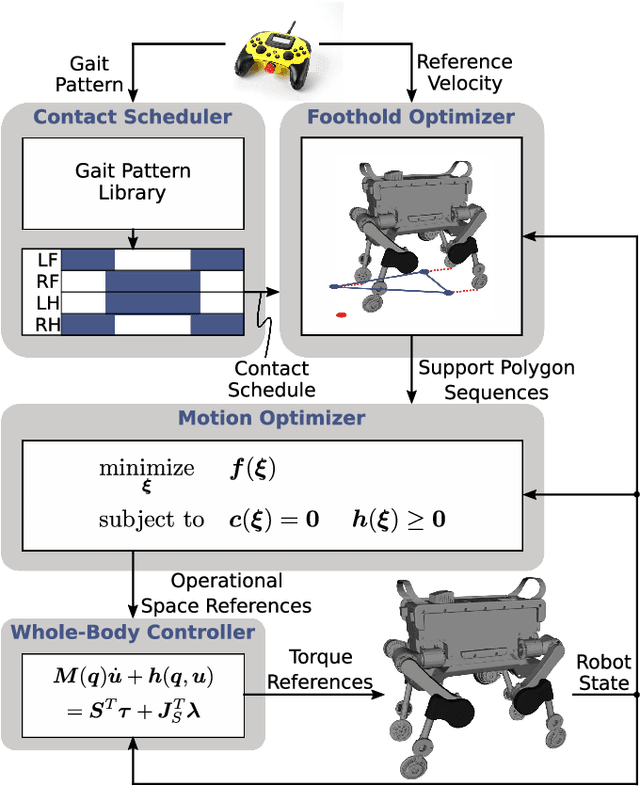
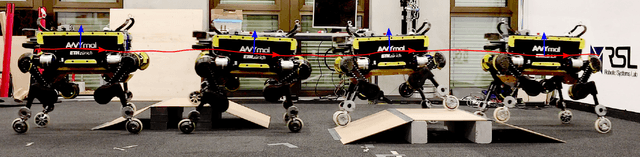
We show dynamic locomotion strategies for wheeled quadrupedal robots, which combine the advantages of both walking and driving. The developed optimization framework tightly integrates the additional degrees of freedom introduced by the wheels. Our approach relies on a zero-moment point based motion optimization which continuously updates reference trajectories. The reference motions are tracked by a hierarchical whole-body controller which computes optimal generalized accelerations and contact forces by solving a sequence of prioritized tasks including the nonholonomic rolling constraints. Our approach has been tested on ANYmal, a quadrupedal robot that is fully torque-controlled including the non-steerable wheels attached to its legs. We conducted experiments on flat and inclined terrains as well as over steps, whereby we show that integrating the wheels into the motion control and planning framework results in intuitive motion trajectories, which enable more robust and dynamic locomotion compared to other wheeled-legged robots. Moreover, with a speed of 4 m/s and a reduction of the cost of transport by 83 % we prove the superiority of wheeled-legged robots compared to their legged counterparts.
* IEEE Robotics and Automation Letters