 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAMOLS: Terrain-Aware Motion Optimization for Legged Systems
Paper and Code
Jul 05, 2022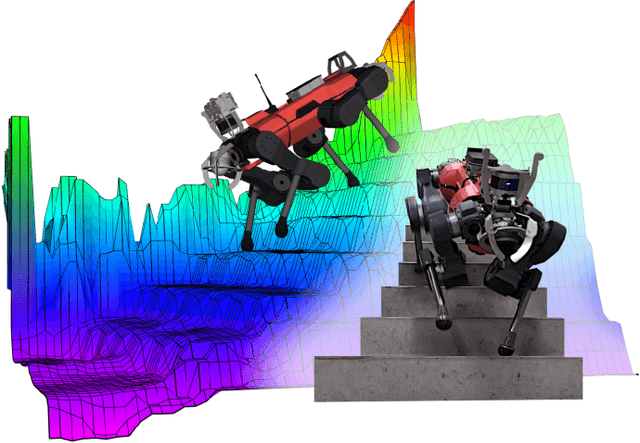
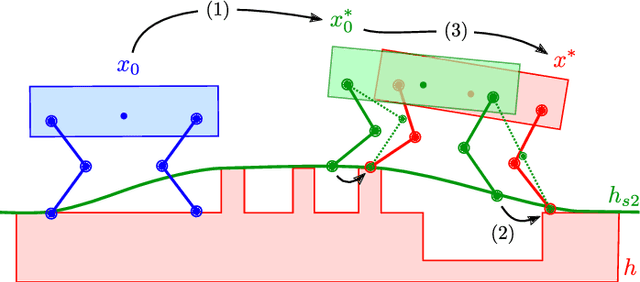

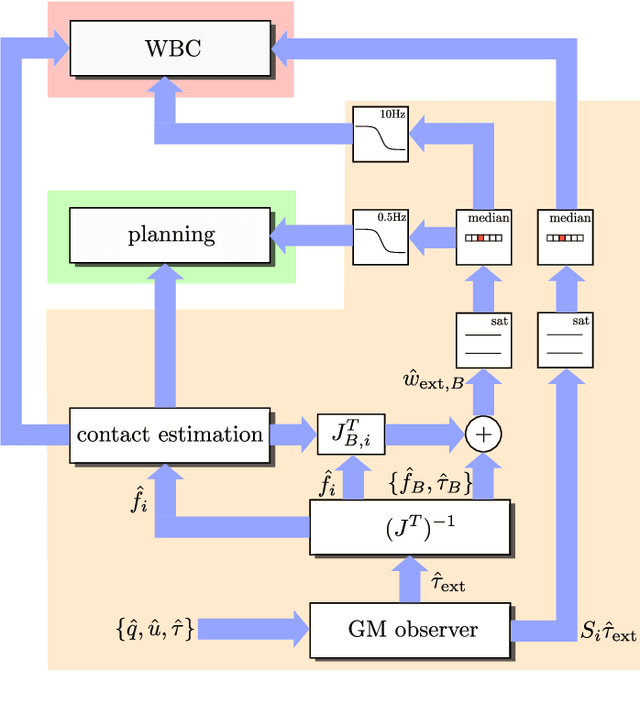
Terrain geometry is, in general, non-smooth, non-linear, non-convex, and, if perceived through a robot-centric visual unit, appears partially occluded and noisy. This work presents the complete control pipeline capable of handling the aforementioned problems in real-time. We formulate a trajectory optimization problem that jointly optimizes over the base pose and footholds, subject to a heightmap. To avoid converging into undesirable local optima, we deploy a graduated optimization technique. We embed a compact, contact-force free stability criterion that is compatible with the non-flat ground formulation. Direct collocation is used as transcription method, resulting in a non-linear optimization problem that can be solved online in less than ten milliseconds. To increase robustness in the presence of external disturbances, we close the tracking loop with a momentum observer. Our experiments demonstrate stair climbing, walking on stepping stones, and over gaps, utilizing various dynamic gaits.