 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBUZZ: Beehive-structured Sparse KV Cache with Segmented Heavy Hitters for Efficient LLM Inference
Oct 30, 2024



Large language models (LLMs) are essential in natural language processing but often struggle with inference speed and computational efficiency, limiting real-time deployment. The key-value (KV) cache mechanism reduces computational overhead in transformer models, but challenges in maintaining contextual understanding remain. In this paper, we propose BUZZ, a novel KV caching algorithm that leverages structured contextual information to minimize cache memory usage while enhancing inference speed. BUZZ employs a beehive-structured sparse cache, incorporating a sliding window to capture recent information and dynamically segmenting historical tokens into chunks to prioritize important tokens in local neighborhoods. We evaluate BUZZ on four real-world datasets: CNN/Daily Mail, XSUM, Wikitext, and 10-QA. Our results demonstrate that BUZZ (1) reduces cache memory usage by $\textbf{2.5}\times$ in LLM inference while maintaining over 99% accuracy in long-text summarization, and (2) surpasses state-of-the-art performance in multi-document question answering by $\textbf{7.69%}$ under the same memory limit, where full cache methods encounter out-of-memory issues. Additionally, BUZZ achieves significant inference speedup with a $\log{n}$ time complexity. The code is available at https://github.com/JunqiZhao888/buzz-llm.
Latent Linear Quadratic Regulator for Robotic Control Tasks
Jul 15, 2024Model predictive control (MPC) has played a more crucial role in various robotic control tasks, but its high computational requirements are concerning, especially for nonlinear dynamical models. This paper presents a $\textbf{la}$tent $\textbf{l}$inear $\textbf{q}$uadratic $\textbf{r}$egulator (LaLQR) that maps the state space into a latent space, on which the dynamical model is linear and the cost function is quadratic, allowing the efficient application of LQR. We jointly learn this alternative system by imitating the original MPC. Experiments show LaLQR's superior efficiency and generalization compared to other baselines.
Perceptive Locomotion through Nonlinear Model Predictive Control
Aug 17, 2022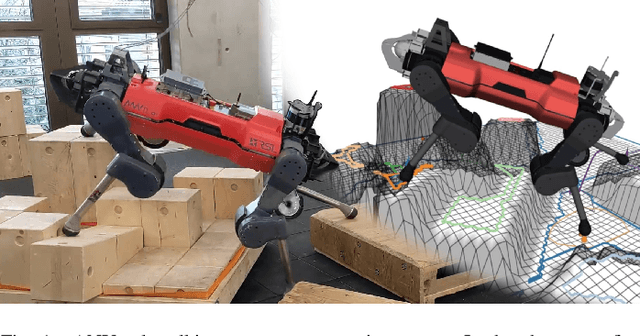
Dynamic locomotion in rough terrain requires accurate foot placement, collision avoidance, and planning of the underactuated dynamics of the system. Reliably optimizing for such motions and interactions in the presence of imperfect and often incomplete perceptive information is challenging. We present a complete perception, planning, and control pipeline, that can optimize motions for all degrees of freedom of the robot in real-time. To mitigate the numerical challenges posed by the terrain a sequence of convex inequality constraints is extracted as local approximations of foothold feasibility and embedded into an online model predictive controller. Steppability classification, plane segmentation, and a signed distance field are precomputed per elevation map to minimize the computational effort during the optimization. A combination of multiple-shooting, real-time iteration, and a filter-based line-search are used to solve the formulated problem reliably and at high rate. We validate the proposed method in scenarios with gaps, slopes, and stepping stones in simulation and experimentally on the ANYmal quadruped platform, resulting in state-of-the-art dynamic climbing.