 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoFL-S: Spatially Queryable Sector Flow Fields for Local Language-Conditioned Navigation
Jul 02, 2026Vision-Language Navigation has increasingly emphasized high-level instruction reasoning, memory, global map construction, and instruction decomposition, while the low-level action representation remains comparatively underexplored. We propose CoFL-S, a low-level vision-language-action framework that predicts a language-conditioned flow field over the robot's local visible sector and generates continuous trajectories by rolling out the predicted field. To train this low-level representation, we convert each VLN-CE episode, originally a whole-episode instruction paired with an action sequence, into frame-level local supervision with aligned sub-instructions and matched action, trajectory, and dense flow-field targets. For evaluation, we introduce a continuous-time Habitat benchmark that isolates low-level action interfaces from instruction decomposition and executes all methods through a shared velocity-command controller, enabling decomposition-independent closed-loop comparison across different planner frequencies rather than fixed discrete forward-and-turn transitions in VLN-CE. Under matched encoders and training settings, CoFL-S consistently outperforms action-token and action-chunk baselines across planner frequencies in the continuous-time Habitat benchmark, and zero-shot real-world closed-loop deployment further shows its advantage over both baselines beyond simulation.
Self-assembling Modular Aerial Robot for Versatile Aerial Tasks
May 19, 2026Multirotor aerial robots excel at maneuvering in three-dimensional space, and recent advances enable nimble navigation in cluttered and confined environments, especially for small airframes. By contrast, platforms built for high-altitude work tend to be larger to deliver high thrust for stable physical interaction with the environment. However, these conflicting design requirements create a long-standing trade-off between nimble navigation and robust aerial manipulation. Here, we present LEGION units, which are reconfigurable modular aerial robots capable of in-flight self-assembly for cooperative manipulation, drawing inspiration from the self-organized collectives formed by ants. Each unit retains nimble maneuverability while joint-equipped docking interfaces at both ends enable end-to-end self-assembly into a flying manipulator. We show that multiple units autonomously dock in flight; once latched, they maintain a zero-clearance interlock by controlling the contact force and torque, enabling reliable aggregation and articulated motion even outdoors. We further show that self-reconfigurability enables morphological switching between nimble individual flight and collective articulated manipulation, while realizing core in-flight manipulation primitives including pushing, pulling, rotating, grasping, and carrying. LEGION's self-organization enables aerial robots, especially in swarms, to shift from passive observers to active participants in their environment, broadening the scope of aerial physical interaction.
Energy-based Regularization for Learning Residual Dynamics in Neural MPC for Omnidirectional Aerial Robots
Apr 16, 2026Data-driven Model Predictive Control (MPC) has lately been the core research subject in the field of control theory. The combination of an optimal control framework with deep learning paradigms opens up the possibility to accurately track control tasks without the need for complex analytical models. However, the system dynamics are often nuanced and the neural model lacks the potential to understand physical properties such as inertia and conservation of energy. In this work, we propose a novel energy-based regularization loss function which is applied to the training of a neural model that learns the residual dynamics of an omnidirectional aerial robot. Our energy-based regularization encourages the neural network to cause control corrections that stabilize the energy of the system. The residual dynamics are integrated into the MPC framework and improve the positional mean absolute error (MAE) over three real-world experiments by 23% compared to an analytical MPC. We also compare our method to a standard neural MPC implementation without regularization and primarily achieve a significantly increased flight stability implicitly due to the energy regularization and up to 15% lower MAE. Our code is available under: https://github.com/johanneskbl/jsk_aerial_robot/tree/develop/neural_MPC.
CoFL: Continuous Flow Fields for Language-Conditioned Navigation
Mar 03, 2026Language-conditioned navigation pipelines often rely on brittle modular components or costly action-sequence generation. To address these limitations, we present CoFL, an end-to-end policy that directly maps a bird's-eye view (BEV) observation and a language instruction to a continuous flow field for navigation. Instead of predicting discrete action tokens or sampling action chunks via iterative denoising, CoFL outputs instantaneous velocities that can be queried at arbitrary 2D projected locations. Trajectories are obtained by numerical integration of the predicted field, producing smooth motion that remains reactive under closed-loop execution. To enable large-scale training, we build a dataset of over 500k BEV image-instruction pairs, each procedurally annotated with a flow field and a trajectory derived from BEV semantic maps built on Matterport3D and ScanNet. By training on a mixed distribution, CoFL significantly outperforms modular Vision-Language Model (VLM)-based planners and generative policy baselines on strictly unseen scenes. Finally, we deploy CoFL zero-shot in real-world experiments with overhead BEV observations across multiple layouts, maintaining reliable closed-loop control and a high success rate.
Design, Modeling and Direction Control of a Wire-Driven Robotic Fish Based on a 2-DoF Crank-Slider Mechanism
Mar 03, 2026Robotic fish have attracted growing attention in recent years owing to their biomimetic design and potential applications in environmental monitoring and biological surveys. Among robotic fish employing the Body-Caudal Fin (BCF) locomotion pattern, motor-driven actuation is widely adopted. Some approaches utilize multiple servo motors to achieve precise body curvature control, while others employ a brushless motor to drive the tail via wire or rod, enabling higher oscillation and swimming speeds. However, the former approaches typically result in limited swimming speed, whereas the latter suffer from poor maneuverability, with few capable of smooth turning. To address this trade-off, we develop a wire-driven robotic fish equipped with a 2-degree-of-freedom (DoF) crank-slider mechanism that decouples propulsion from steering, enabling both high swimming speed and agile maneuvering. In this paper, we first present the design of the robotic fish, including the elastic skeleton, waterproof structure, and the actuation mechanism that realizes the decoupling. We then establish the actuation modeling and body dynamics to analyze the locomotion behavior. Furthermore, we propose a combined feedforward-feedback control strategy to achieve independent regulation of propulsion and steering. Finally, we validate the feasibility of the design, modeling, and control through a series of prototype experiments, demonstrating swimming, turning, and directional control.
Learning Agile and Robust Omnidirectional Aerial Motion on Overactuated Tiltable-Quadrotors
Feb 25, 2026Tilt-rotor aerial robots enable omnidirectional maneuvering through thrust vectoring, but introduce significant control challenges due to the strong coupling between joint and rotor dynamics. While model-based controllers can achieve high motion accuracy under nominal conditions, their robustness and responsiveness often degrade in the presence of disturbances and modeling uncertainties. This work investigates reinforcement learning for omnidirectional aerial motion control on over-actuated tiltable quadrotors that prioritizes robustness and agility. We present a learning-based control framework that enables efficient acquisition of coordinated rotor-joint behaviors for reaching target poses in the $SE(3)$ space. To achieve reliable sim-to-real transfer while preserving motion accuracy, we integrate system identification with minimal and physically consistent domain randomization. Compared with a state-of-the-art NMPC controller, the proposed method achieves comparable six-degree-of-freedom pose tracking accuracy, while demonstrating superior robustness and generalization across diverse tasks, enabling zero-shot deployment on real hardware.
Hierarchical Trajectory Planning of Floating-Base Multi-Link Robot for Maneuvering in Confined Environments
Feb 25, 2026Floating-base multi-link robots can change their shape during flight, making them well-suited for applications in confined environments such as autonomous inspection and search and rescue. However, trajectory planning for such systems remains an open challenge because the problem lies in a high-dimensional, constraint-rich space where collision avoidance must be addressed together with kinematic limits and dynamic feasibility. This work introduces a hierarchical trajectory planning framework that integrates global guidance with configuration-aware local optimization. First, we exploit the dual nature of these robots - the root link as a rigid body for guidance and the articulated joints for flexibility - to generate global anchor states that decompose the planning problem into tractable segments. Second, we design a local trajectory planner that optimizes each segment in parallel with differentiable objectives and constraints, systematically enforcing kinematic feasibility and maintaining dynamic feasibility by avoiding control singularities. Third, we implement a complete system that directly processes point-cloud data, eliminating the need for handcrafted obstacle models. Extensive simulations and real-world experiments confirm that this framework enables an articulated aerial robot to exploit its morphology for maneuvering that rigid robots cannot achieve. To the best of our knowledge, this is the first planning framework for floating-base multi-link robots that has been demonstrated on a real robot to generate continuous, collision-free, and dynamically feasible trajectories directly from raw point-cloud inputs, without relying on handcrafted obstacle models.
Flexible Morphing Aerial Robot with Inflatable Structure for Perching-based Human-Robot Interaction
Sep 09, 2025

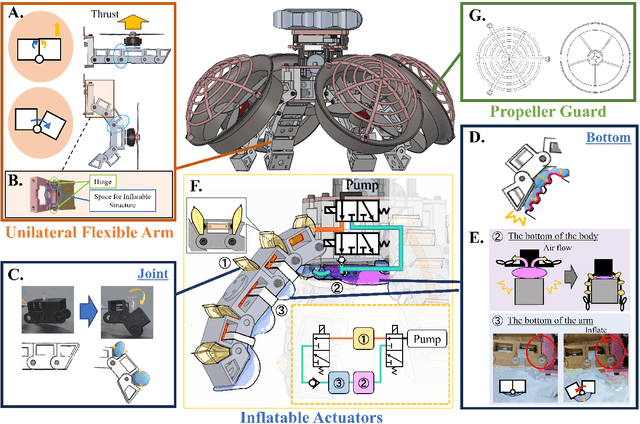

Birds in nature perform perching not only for rest but also for interaction with human such as the relationship with falconers. Recently, researchers achieve perching-capable aerial robots as a way to save energy, and deformable structure demonstrate significant advantages in efficiency of perching and compactness of configuration. However, ensuring flight stability remains challenging for deformable aerial robots due to the difficulty of controlling flexible arms. Furthermore, perching for human interaction requires high compliance along with safety. Thus, this study aims to develop a deformable aerial robot capable of perching on humans with high flexibility and grasping ability. To overcome the challenges of stability of both flight and perching, we propose a hybrid morphing structure that combines a unilateral flexible arm and a pneumatic inflatable actuators. This design allows the robot's arms to remain rigid during flight and soft while perching for more effective grasping. We also develop a pneumatic control system that optimizes pressure regulation while integrating shock absorption and adjustable grasping forces, enhancing interaction capabilities and energy efficiency. Besides, we focus on the structural characteristics of the unilateral flexible arm and identify sufficient conditions under which standard quadrotor modeling and control remain effective in terms of flight stability. Finally, the developed prototype demonstrates the feasibility of compliant perching maneuvers on humans, as well as the robust recovery even after arm deformation caused by thrust reductions during flight. To the best of our knowledge, this work is the first to achieve an aerial robot capable of perching on humans for interaction.
Falconry-like palm landing by a flapping-wing drone based on the human gesture interaction and distance-aware flight planning
Jul 23, 2025



Flapping-wing drones have attracted significant attention due to their biomimetic flight. They are considered more human-friendly due to their characteristics such as low noise and flexible wings, making them suitable for human-drone interactions. However, few studies have explored the practical interaction between humans and flapping-wing drones. On establishing a physical interaction system with flapping-wing drones, we can acquire inspirations from falconers who guide birds of prey to land on their arms. This interaction interprets the human body as a dynamic landing platform, which can be utilized in various scenarios such as crowded or spatially constrained environments. Thus, in this study, we propose a falconry-like interaction system in which a flapping-wing drone performs a palm landing motion on a human hand. To achieve a safe approach toward humans, we design a trajectory planning method that considers both physical and psychological factors of the human safety such as the drone's velocity and distance from the user. We use a commercial flapping platform with our implemented motion planning and conduct experiments to evaluate the palm landing performance and safety. The results demonstrate that our approach enables safe and smooth hand landing interactions. To the best of our knowledge, it is the first time to achieve a contact-based interaction between flapping-wing drones and humans.
Six-DoF Hand-Based Teleoperation for Omnidirectional Aerial Robots
Jun 17, 2025Omnidirectional aerial robots offer full 6-DoF independent control over position and orientation, making them popular for aerial manipulation. Although advancements in robotic autonomy, operating by human remains essential in complex aerial environments. Existing teleoperation approaches for multirotors fail to fully leverage the additional DoFs provided by omnidirectional rotation. Additionally, the dexterity of human fingers should be exploited for more engaged interaction. In this work, we propose an aerial teleoperation system that brings the omnidirectionality of human hands into the unbounded aerial workspace. Our system includes two motion-tracking marker sets -- one on the shoulder and one on the hand -- along with a data glove to capture hand gestures. Using these inputs, we design four interaction modes for different tasks, including Spherical Mode and Cartesian Mode for long-range moving as well as Operation Mode and Locking Mode for precise manipulation, where the hand gestures are utilized for seamless mode switching. We evaluate our system on a valve-turning task in real world, demonstrating how each mode contributes to effective aerial manipulation. This interaction framework bridges human dexterity with aerial robotics, paving the way for enhanced teleoperated aerial manipulation in unstructured environments.