 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing and Navigation of Aerial Robot for Measuring Tree Location and Size in Forest Environment
Feb 12, 2023This paper shows the achievement of a sensing and navigation system of aerial robot for measuring location and size of trees in a forest environment autonomously. Although forestry is an important industry in Japan, the working population of forestry is decreasing. Then, as an application of mechanization of forestry, we propose tree data collection system by aerial robots which have high mobility in three-dimensional space. First, we develop tree recognition and measurement method, along with algorithm to generate tree database. Second, we describe aerial robot navigation system based on tree recognition. Finally, we present an experimental result in which an aerial robot flies in a forest and collects tree data.
Design, Modeling and Control of a Quadruped Robot SPIDAR: Spherically Vectorable and Distributed Rotors Assisted Air-Ground Amphibious Quadruped Robot
Jan 10, 2023
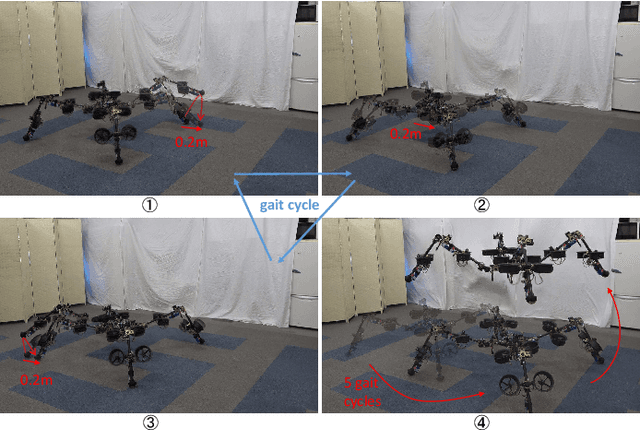


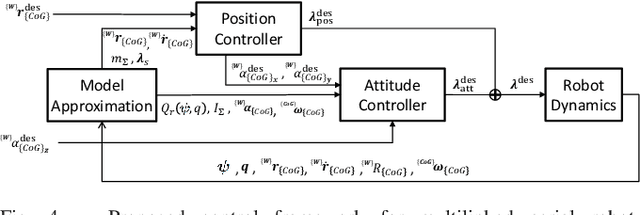
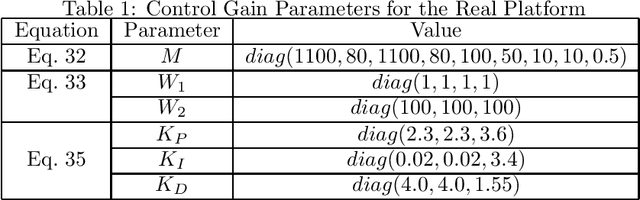
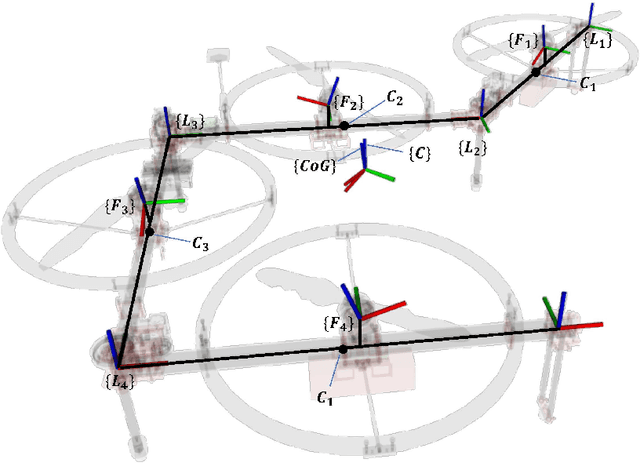
Multimodal locomotion capability is an emerging topic in robotics field, and various novel mobile robots have been developed to enable the maneuvering in both terrestrial and aerial domains. Among these hybrid robots, several state-of-the-art bipedal \robots enable the complex walking motion which is interlaced with flying. These robots are also desired to have the manipulation ability; however, it is difficult for the current forms to keep stability with the joint motion in midair due to the central\ized rotor arrangement. Therefore, in this work, we develop a novel air-ground amphibious quadruped robot called SPIDAR which is assisted by spherically vectorable rotors distributed in each link to enable both walking motion and transformable flight. F\irst, we present a unique mechanical design for quadruped robot that enables terrestrial and aerial locomotion. We then reveal the modeling method for this hybrid robot platform, and further develop an integrated control strategy for both walking and fl\ying with joint motion. Finally, we demonstrate the feasibility of the proposed hybrid quadruped robot by performing a seamless motion that involves static walking and subsequent flight. To the best of our knowledge, this work is the first to achieve a \quadruped robot with multimodal locomotion capability, which also shows the potential of manipulation in multiple domains.
Singularity-free Aerial Deformation by Two-dimensional Multilinked Aerial Robot with 1-DoF Vectorable Propeller
Jan 13, 2021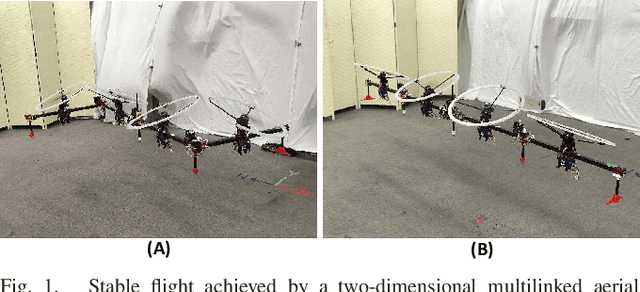
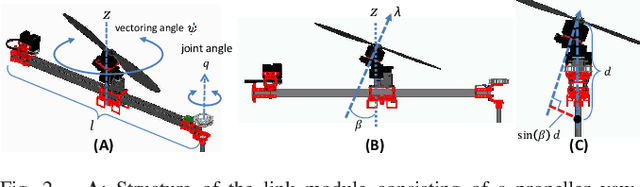
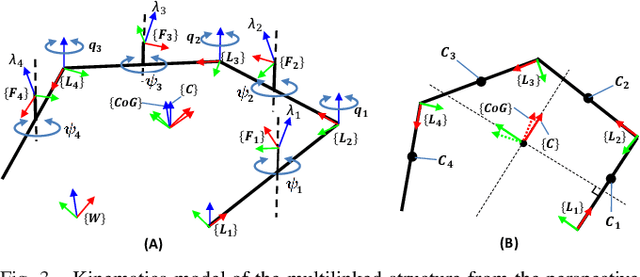
Two-dimensional multilinked structures can benefit aerial robots in both maneuvering and manipulation because of their deformation ability. However, certain types of singular forms must be avoided during deformation. Hence, an additional 1 Degrees-of-Freedom (DoF) vectorable propeller is employed in this work to overcome singular forms by properly changing the thrust direction. In this paper, we first extend modeling and control methods from our previous works for an under-actuated model whose thrust forces are not unidirectional. We then propose a planning method for the vectoring angles to solve the singularity by maximizing the controllability under arbitrary robot forms. Finally, we demonstrate the feasibility of the proposed methods by experiments where a quad-type model is used to perform trajectory tracking under challenging forms, such as a line-shape form, and the deformation passing these challenging forms.
Versatile Multilinked Aerial Robot with Tilting Propellers: Design, Modeling, Control and State Estimation for Autonomous Flight and Manipulation
Aug 12, 2020

Multilinked aerial robot is one of the state-of-the-art works in aerial robotics, which demonstrates the deformability benefiting both maneuvering and manipulation. However, the performance in outdoor physical world has not yet been evaluated because of the weakness in the controllability and the lack of the state estimation for autonomous flight. Thus we adopt tilting propellers to enhance the controllability. The related design, modeling and control method are developed in this work to enable the stable hovering and deformation. Furthermore, the state estimation which involves the time synchronization between sensors and the multilinked kinematics is also presented in this work to enable the fully autonomous flight in the outdoor environment. Various autonomous outdoor experiments, including the fast maneuvering for interception with target, object grasping for delivery, and blanket manipulation for firefighting are performed to evaluate the feasibility and versatility of the proposed robot platform. To the best of our knowledge, this is the first study for the multilinked aerial robot to achieve the fully autonomous flight and the manipulation task in outdoor environment. We also applied our platform in all challenges of the 2020 Mohammed Bin Zayed International Robotics Competition, and ranked third place in Challenge 1 and sixth place in Challenge 3 internationally, demonstrating the reliable flight performance in the fields.
Deep Gated Multi-modal Learning: In-hand Object Pose Estimation with Tactile and Image
Sep 27, 2019



In robot manipulation tasks, especially in-hand manipulation, estimation of the position and orientation of an object is an essential skill to manipulate objects freely. However, since in-hand manipulation tends to cause occlusion by the hand itself, image information only is not sufficient. For the challenge, combining tactile sensors is one of the approaches. The advantage of using multiple sensors (modals) is that the other modals can compensate for occlusion, noise, and sensor malfunctions. Even though the decision making of each modal reliability corresponding to the situations is important, the manual design of the model is difficult to deal with various situations. Therefore, in this study, we propose deep gated multi-modal learning using end-to-end deep learning in which the network self-determines the reliability of each modal. As experiments, an RGB camera and a GelSight tactile sensor were attached to the gripper of the Sawyer robot, and the poses were estimated during grasping. A total of 15 objects were used in the experiments. In the proposed model, the reliability of the modal was determined according to the noise and failure of each modal, and it was confirmed that the pose was estimated even for unknown objects.