 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Modeling and Control of a Quadruped Robot SPIDAR: Spherically Vectorable and Distributed Rotors Assisted Air-Ground Amphibious Quadruped Robot
Paper and Code
Jan 10, 2023
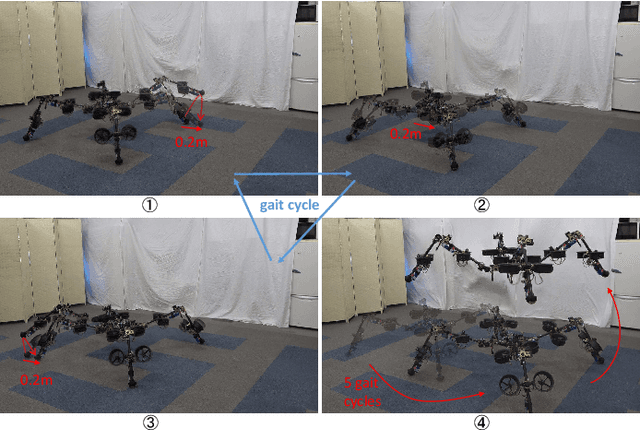


Multimodal locomotion capability is an emerging topic in robotics field, and various novel mobile robots have been developed to enable the maneuvering in both terrestrial and aerial domains. Among these hybrid robots, several state-of-the-art bipedal \robots enable the complex walking motion which is interlaced with flying. These robots are also desired to have the manipulation ability; however, it is difficult for the current forms to keep stability with the joint motion in midair due to the central\ized rotor arrangement. Therefore, in this work, we develop a novel air-ground amphibious quadruped robot called SPIDAR which is assisted by spherically vectorable rotors distributed in each link to enable both walking motion and transformable flight. F\irst, we present a unique mechanical design for quadruped robot that enables terrestrial and aerial locomotion. We then reveal the modeling method for this hybrid robot platform, and further develop an integrated control strategy for both walking and fl\ying with joint motion. Finally, we demonstrate the feasibility of the proposed hybrid quadruped robot by performing a seamless motion that involves static walking and subsequent flight. To the best of our knowledge, this work is the first to achieve a \quadruped robot with multimodal locomotion capability, which also shows the potential of manipulation in multiple domains.